
鵝廠工程師讓機器人有「觸覺」,它反手秀了段雜技
我們找到制作Ollie的Robotics X 機器人實驗室相關技術工作者們聊了聊。
詹士 發自 凹非寺
量子位 | 公眾號 QbitAI
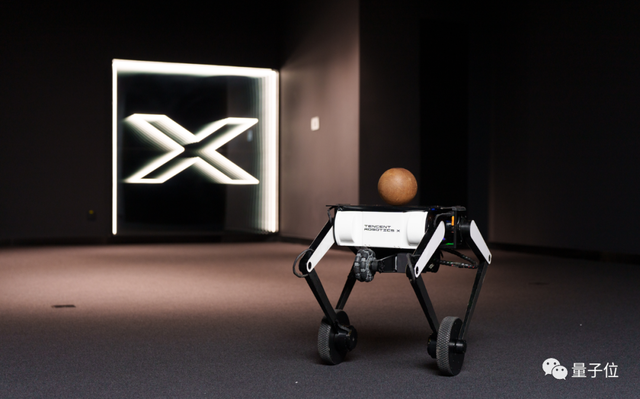
這個小機器人有點厲害!
光禿禿「頭」上放個小球,來回走也不掉:
還會舉一反三,不同大小材質重量的球,都能穩住:
加大難度——
下了個小臺階,走上公園凹凸不平的綠地,它也「頂得住」:

上下坡,甚至中途小球彈起,也無所畏懼:

它叫Ollie,來自鵝廠Robotics X 機器人實驗室,就在剛剛,上面種種技能被公之于眾。
機器人Ollie誕生于2021年,剛亮相就為我們搞出了新花樣,一年前,這個小機靈鬼以一出「后空翻」驚艷四座:
如今再看,更「靈活」,也更「聰明」了。
所以,這些技能是如何解鎖的?
我們找到制作Ollie的Robotics X 機器人實驗室相關技術工作者們聊了聊。
新能力,觸覺感應
據介紹,Ollie背后的核心能力是——
觸覺感應功能。
具體來說,該大類技術以觸覺傳感器為基礎,在機器人身上將實現觸覺信號的準確采集、處理,并基于觸覺感知信號完成模式識別、人機交互、運動控制等任務。
放在Ollie頂球這個Case中,有三大關鍵項。
我們先從觸覺傳感器方面說起。
據實驗室工程師分享,這回,他們將觸覺傳感器應用于Ollie,意在探索以觸覺傳感器作為機器人電子皮膚,對移動機器人的人機交互能力以及一體化感知、規劃、控制能力上的賦能。
在壓阻材料上,團隊首次采用了合作研發的新傳感器陣列,最小空間分辨率達創紀錄的0.9mm。
該新型材料同時具有超高靈敏度、超大量程、超快響應速度、強穩定性的特點。
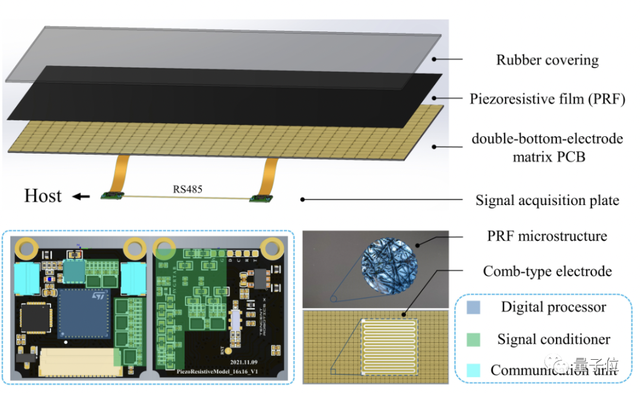
Ollie頭頂就被安上一塊這種傳感器陣列,結合定制化的傳感器電極適配模塊和內部標準化的傳感器信號采集模塊,在Ollie 200mm x400mm頭頂表面上實現了點陣信號的快速采集——
其次,看看平衡控制方面。
在過去,傳統方法依賴機器人自身動力學參數的辨識,一旦參數不準確或情況變化,效果就會拉胯。
為此,團隊為Ollie做了一套基于自適應動態規劃的平衡控制(ADP),可以更快找到各場景和身姿狀態下保持平衡的方式。
值得一提的是,這是「自適應動態規劃」在輪式機器人平衡控制上的首次應用,相關論文已在IEEE Robotics and Automation Letters上發表。
最后還需要解決挑戰高難度的頭部平衡、搬運球形物體任務。
Ollie頂球難,難就難在「球是活動的」,機器人還在移動,其間需要不斷根據球體狀態變化調整自己。
有了觸覺的支持,結合穩定的運動能力,Ollie 還可以挑戰高難度的頭部平衡、搬運球形物體任務,充分利用球體與機器人表面的接觸信息,結合自身姿態傳感器和關節電機編碼器的數據,實現了上身物體操控能力和下身移動平衡能力的完美結合。
Ollie 利用新型觸覺傳感器感知球的相對位置與運動狀態,并實時處理數據,控制自身在不同地形上實現平衡穩定行駛的基礎上,還能保持球不掉落。其背后的領先性技術,為移動機器人提升復雜場景下的自身移動與物品操控能力打下了堅實的基礎。

正是以上三項關鍵技術,使Ollie得以在各種運動姿態和環境下把球穩穩「頂住」。
不過,觸覺感知及相關衍生技術的意義不止于此。
加入新型觸覺傳感器后,Ollie可以用自己的「皮膚」來感受外界的接觸信息,包括對觸碰方式、觸碰力度、觸碰方位、觸碰軌跡形狀的感知和識別,并以不同方式作出回應。
目前,它已能根據一次觸摸,識別對象的方位:

△誰在摸我?原來是你!
畫個圈,也能識別圖案,且有樣學樣轉一圈:
不止Ollie一「人」,在整個機器人領域,該方面探索有著更深更廣的價值。
感知與認知技術是機器人得以安全、高效、自主運行的基礎。近年來,計算機視覺領域發展迅速,取得了不少可以媲美甚至超越人類的成果。相對而言,觸覺感知技術發展相對緩慢,一定程度上制約了機器人能力的擴展。如何在人機交互、運動控制和靈巧操作等應用場景中讓機器人具備接近人類水平的觸覺能力,成為近年的研究熱點和技術挑戰之一。
因此,從Robotics X 機器人實驗室視角看,Ollie只是一個具體研究對象,更看重的,是在觸覺感知相關技術有進一步探索和嘗試。
還有更多新技術
除了頭上頂球,Ollie此番還秀出另一大獨門絕技——
雙輪邁步。
如果說,去年Ollie的騰空翻身的極限運動表演,那這回,「邁步向前」更像是瑜伽,拼的是核心力量和平衡性。
這一過程中,機器人單個輪子著地的時間和步頻不等,Ollie憑單輪既要利用支撐的輪腿控制行駛轉向,又要保持俯仰和橫滾方向的動態平衡。
所以,Ollie如何完成的?
工程師介紹,他們在單腿支撐階段,為機器人建立了簡易動力學模型,使用非線性優化的辦法,完成動作軌跡生成與控制。
此外,在雙腿支撐階段,機器人的兩個輪子與地面間存在相對滑動。這使得機器人的接觸力和動力學特性十分復雜。因此,研究團隊采用了數據驅動方式,將強化學習方法用于該動作中關節角序列的生成,并將生成的關節角序列用于機器人動作與姿態控制。
也因此,雙輪邁步成了Ollie的獨門絕技。
關于未來進一步規劃,Robotics X 機器人實驗室工程師們透露,他們這回集中研究了身體表面的電子皮膚類型的傳感器,后面考慮將觸覺傳感器應用在機器人其他部位。
你覺得,這些技術應用后,Ollie還能整出什么花活?
參考鏈接:
[1]https://ieeexplore.ieee.org/abstract/document/9497675
[2]https://arxiv.org/abs/2208.10933
— 完 —
量子位 QbitAI · 頭條號簽約
關注我們,第一時間獲知前沿科技動態
- 大數據已死!從業10年老哥爆文抨擊:這套唬不住客戶了2023-02-14
- ChatGPT五分鐘寫完插件,功能完善,還可加需求改BUG2023-02-09
- 谷歌創始人親自下場改代碼,ChatGPT讓谷歌真慌了2023-02-03
- 谷歌加緊測試ChatGPT競品,靠對話可搜最新信息2023-02-02










