理想智駕王炸:車位到車位全程在線,還能自主過收閘機
“800萬clips訓練”
最新V13版本智能駕駛,落地中國!

不是期貨FSD,而是理想剛剛推送的端到端智駕版本V13。
“車位到車位”、“無限接近0接管”、“800萬Clips訓練數據”…
2025開年,靠端到端躋身智駕第一梯隊的理想,又率先提速了。
這個年,卷起來卷起來~
理想V13,有啥變化
和FSD重名只能說巧合了,理想透露說剛好這也是端到端迭代的第13個大版本,MAX車型今天剛剛推送,智駕版本號為AD Max V13.0。
整體硬件配置,包括2顆英偉達Orin X芯片,算力超500TOPS;1顆128線高分辨率激光雷達;6個800萬像素高清攝像頭和5個200萬像素攝像頭,以及5個毫米波雷達。
L9、8、7、6,以及MEGA的MAX版本全都相同。
正式推送之前,不少內測用戶已經在理想用戶社區上傳了一手實測體驗。
比如@皮特格雷的用戶,是在晚高峰進行的體驗。
一個最易被用戶感知的亮點,同樣也是劃分今年智駕“領先一代”的功能——車位到車位,實裝上車了。
可以看到,用戶在接近自家小區地庫入口時,AD Max系統直接從城市NOA切換到自主記憶泊車AVP,直接來了一個絲滑的轉彎入庫,最牛X的地方在于系統已經能夠自主過閘機了:

同時意味著在高速路端,AD Max也能自主過收費站。
進入地庫后,先是來了一個180度U型轉彎掉頭,然后直奔車位而去,過程中成功避讓了地庫內大大小小不規則的承重柱/墻和一位行人:

最后是一連串絲滑的停車入庫,本身難度不大,但連接起整個行車、泊車智駕體驗,給用戶帶來的實用性和新引力是巨大的:

在公開路段上,AD Max V13.0也有令人驚喜的進步。
另外一位用戶@陳偉有理想上傳了AD Max V13.0在一段高速施工+大車博弈路段的表現。
一開始是系統正在完成對一輛低速卡車的超越,“不跟慢車”以及避讓大車的通行策略,幾乎是所有NOA的共識。但超車還未完成,就遇到了路邊施工占道:

AD Max V13.0在貼著樁桶大約3-5mide樣子迅速完成了向右變道避讓,全程沒有任何讓人不舒適的緊急剎車,等于同時完成超車+避讓。
“端味”更強的一點在于,系統現在會更加靈活貫徹效率優先通行策略。
以前是提前2公里就變道最右側,即使前面有慢車也會尾隨。
但現在系統會盡量多的超過右側慢車,在車道變成實線之前迅速完成向右并線,用戶的這個實測案例是600m的距離:

端到端優勢,在城市道路內體現的更極致,比如現在AD Max V13.0已經能夠處理不規則的復雜環路——處在幾個立交橋下方,還充斥著各種車和車、人和車、兩輪車和車的博弈:

從前面各個實測畫面中,其實能看出理想AD Max V13.0的另一個重大變化——AI可視化。
首先是右側現在實時顯示10條可能的行駛路線及其概率:

路線一致性越高,說明場景越簡單,反之說明場景更加復雜,路線選擇的不確定性在上升——直觀完整的把端到端思考過程展現在用戶面前,增強信任感。
第二個可視化功能是“熱力圖”注意力系統,告訴你系統現在關注目標的優先級——越“紅”的說明系統目前注意力分配越多,讓你直觀看到智駕系統的“防御性駕駛”策略。

最后是屏幕最右側的智能駕駛翻譯官,由理想自研VLM(視覺語言模型)?實時解說智駕系統的策略以及給出建議。
把復雜高深的智駕技術、智駕系統決策過程這個“大黑盒”打開,用大白話呈現翻譯。
有啥用?
大大提升用戶對智駕的信任和熟悉程度,好用之外,增加“愛用”的理由。
幾乎所有智駕玩家都死磕corner case,認為這是阻礙用戶信任智駕的核心。當然沒錯,不過體現的是純純的理工科思維。
怎么在產品體驗、用戶心理接受度和觀感上下功夫,從來沒人思考過。
論“懂用戶”和產品體驗,理想當仁不讓。
理想V13 800萬clips訓練,啥水平
理想最新AD Max V13.0系統,官方的描述中出現了一個新表述:
800萬clips訓練數據。
啥意思?
所謂clips就是片段,一整條帶有時間特征的行車視頻數據,一般一個clips持續約30s左右,是從上億公里的真實數據中精挑細選出來的“五星司機”數據,同時數據標注過程、模型的訓練過程已經實現完全的自動化。
與之前自動駕駛“系統學習XX幀數據”的表述完全不同。
背后體現的是整個行業技術范式的深刻變化。
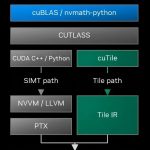
體現在理想AD Max V13.0,就是“一快一慢”兩系統。
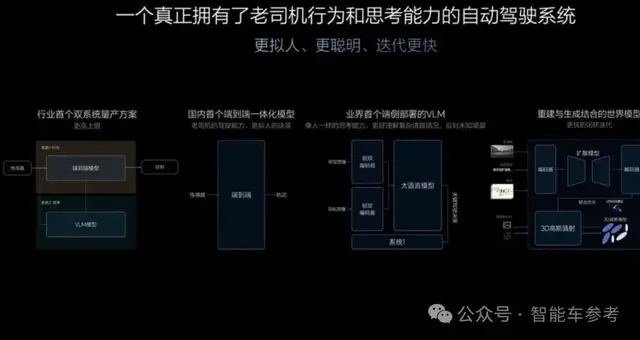
快的是端到端模型本身,應對實時駕駛任務,也就是可視化屏幕上左側概率路線和注意力的部分;慢的則是VLM大模型,用來學習常識,應對未知路況,比如潮汐車道等等,對應屏幕右側的實時解說部分。
端到端負責感知、決策、規劃,是AI司機的主體。并且理想端到端不同于華為,采用更直接的One Model結構,不分層:
輸入傳感器數據,直接輸出自車行駛軌跡。
One Model典型玩家是特斯拉,國內的商湯絕影UniAD也選擇了這條路線,同樣也走到了量產前夜。
至于VLM,本質是一個多模態大模型,作用是智能駕駛“點讀機”,哪里不會點哪里,利用大語言模型的認知能力理解場景,輸出另外一條行駛軌跡給端到端模型參考修正。

為啥要這么做?理想解釋因為端到端模型盡管直接學習人類成熟駕駛經驗,但黑盒決策過程不為人知。對于目標的錯檢漏檢,以及幻覺問題難以通過直接調參解決。
所以要加這么一個“點讀機”,以及適當的強化學習手段來規范端到端模型的行為。
總結一下理想端到端智駕技術:
最大的不同點是沒用國內主流的多段式結構,而是和特斯拉One Model一樣一步到位,而且也是國內量產進度最快的。
但理想和特斯拉不同的點又在于,選擇用語言模型為基礎的多模態模型作為認知能力的補充,和小鵬、蔚來、商湯等等玩家相同。
以及還有一點,端到端模型參數量4-5億,VLM總參數量22億,完全能在現有Orin芯片的理想各個MAX車型上實現車端部署。
最后就是迭代速度的“斷代式”領先:
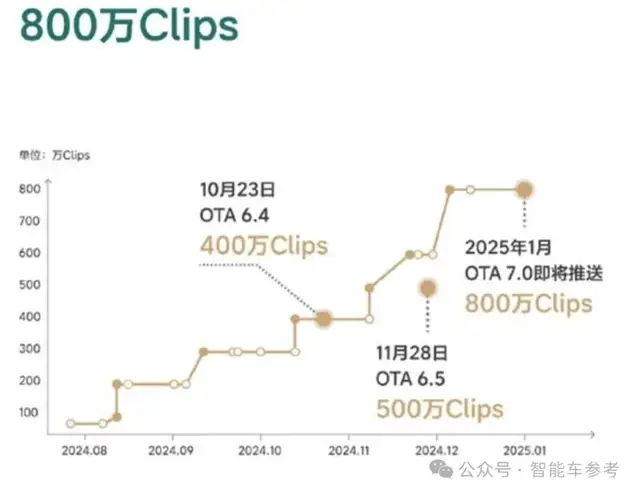
四個月內,AD MAX系統已經學習了64000小時左右老司機的駕駛經驗。
理想提速反映了什么?
2024年底2025年初,智駕卷出新速度。
比亞迪、小鵬,蔚來,理想…都提速了。
比如小鵬趕在年末最后一天,推送了車位到車位先鋒版小范圍內測;蔚來李斌明確了今年將主攻高階智駕的安全體驗;大疆和比亞迪,則專注極致性價比方案在10萬級車型的普及…極氪甚至在2024年12月31日還來了一波趕KPI式的交卷。
不同玩家選擇的技術路線、硬件方案、落地車型價位各有不同,但最后交付到用戶,看可以實現的能力就行。而站在2024年12月31日之前,圍繞智能駕駛,最先進的一代——領先一代,就是可以實現全量推送的車位到車位體驗,結束內測或者小范圍公測,可以直接提現技術的成熟度。

其次是能夠實現城區NOA的次世代,高速環路NOA的正當代……以及大部分只有L2的“落后一代”。
當然在中國市場,最特殊的自然莫過于特斯拉,其代表領先一代的FSD還沒能獲準中國上路,但因為馬斯克超前的布局和超強的技術堅持,每一輛已經上路的特斯拉,擁有FSD能力大概也就差一次OTA而已。作為端到端范式的最早實踐者,也作為車位到車位實現路徑的引領者,特斯拉是一個特殊的存在,一個讓所有中國智駕玩家枕戈待旦不敢輕視的存在。

不過隨著車位到車位的智駕技術推送實現,智駕的起點和終點也就已經卷到頭了。
剩下的就是整個過程中的產品體驗、用戶體驗,這也是理想正在快速展現勢能和動能轉換的關鍵原因。
實際上,理想造車以來,并不以智駕先聲奪人,但站在當前來看,優勢正在越來越顯而易見。
首先是AI大模型、通用能力作為自動駕駛核心基調,而非簡單的駕駛任務。全球范圍內,自研基礎大模型基座的造車玩家,似乎只有特斯拉和理想。
而明確講VLM、多模態和智駕模型融合,理想則邁出行業第一步。

第二點,理想“套娃”的造車方式如今來看,絕不僅僅是省成本這個層面的考慮。相同的設計帶來相同的傳感器布置、帶來相同的底層硬件方案。
從AI軟件上來看,套娃直接創造了相同模組下的硬件載具,方案統一、接口統一、數據統一,迭代起來也會更加高效,實現規模效應——在scaling law作用下的今天,更顯關鍵。
第三點,理想其實從一開始就暴露過智駕方向上的野心。
從理想ONE開始,理想的智能駕駛功能,不僅標配,而且免費,這就打掉了用戶使用的門檻,可以讓車主用戶成為影子模式迭代下,最直接的參與者。相比無法隨車標配、額外付費的業內方式,理想算是以終為始地看清了AI迭代的本質,利在長遠。

不少人有過疑問,為什么理想在2024年忽然就實現了智駕能力上大步提升。如果嚴格審視,答案在理想ONE的時候就已經在謀篇布局了。
只不過不是所有標配免費的智駕方案,都會成為智駕能力飛升的充分必要條件,原因很簡單——
你必須賣得足夠好,上路得車足夠多,有效智駕里程的積累足夠巨大。
而理想做到了,先是ONE一代的蓄勢,然后是L系列的引爆,銷量一飛沖天之后,智能駕駛或者AI需要的數據規模,在理想這里也就變成了資源、勢能和潛力要素。

智能駕駛的道路千萬條,但第一性原理只有一條:數據。
畢竟AI的第一性原理,就是數據。
馬斯克最早洞察了這個原理,所以選擇了和谷歌Waymo不一樣的自動駕駛實現路徑,并且已經展現出了志在必得的潛力,可以更早奪取金杯。
理想似乎也洞察了這個原理,所以在傳感器、硬件、軟件方案等方面,都早早開啟了統一標準化布局,又趕上了端到端范式的變革,完美契合“數據驅動”的核心引擎,讓scaling law發揮作用。
所以理想的這個智能駕駛表現和影響,可能才剛剛開始。

其實評價理想的智能駕駛水平,還有另一個更“客觀”的維度。
在華為“遙遙領先”的智駕水平、營銷聲勢之下,華為賦能的車型幾乎和理想在巷戰肉搏競爭,同樣是家用SUV、同樣有增程路線,但最后理想還能保持月銷5W的水平,沒被打趴下……
這幾乎就是對理想智駕水平最直接的反映了。
One more thing
最后再補充一點有意思的。
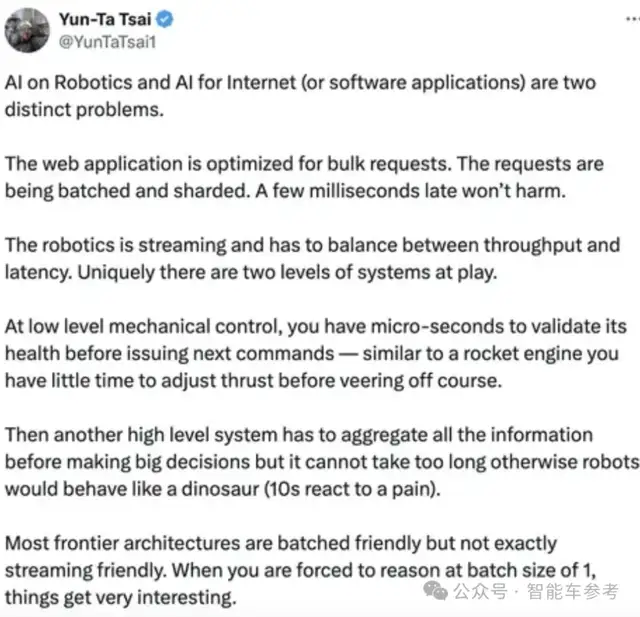
特斯拉Autopilot資深工程師Yun-Ta Tsai曾分享稱,ChatGPT這樣的互聯網AI對毫秒級別的延遲不敏感,但自動駕駛、機器人必須在吞吐量和延遲之間尋找平衡。所以有兩個級別的系統在發揮作用:
在低級機械控制中,只有幾微秒的時間,就像火箭發動機一樣,在偏離航線之前幾乎沒有時間調整推力;另一個高級系統,則必須在做出重大決策之前匯總所有信息。
與理想的快慢系統頗有相似之處,若特斯拉FSD也采用類似的架構(從未公布過),應該不讓人感到意外。
- 中國汽車一哥加持,自動駕駛界「大疆」估值沖破百億2025-11-26
- 神盾金磚電池成功挑戰行業首個“整車+整包”帶電六大極端測試2025-09-02
- 對話吉利技術一號位:VLA大模型打底,沖刺全球最大機器人公司2025-09-02
- 全新嵐圖知音正式上市,20.29萬元起2025-08-28
相關閱讀