3月17日,上海 —— 傅利葉正式開源全尺寸人形機器人數據集Fourier ActionNet,并發布全球首個全流程工具鏈。首批上線超3萬條高質量真機訓練數據,包含多種自由度靈巧手的訓練數據及專門針對手部任務的模仿學習數據,面向全球開發者及科研機構開源共享,提供從數據采集、訓練、部署的一站式解決方案。

數據高質量,提升訓練有效性
高質量機器人動作數據是具身智能發展的核心驅動力。然而真實場景下的機器人動作數據長期面臨采集成本高、標注精度不足等問題,制約著行業進步。Fourier ActionNet數據集囊括傅利葉GRx系列所有機型的各類任務訓練,完整記錄機器人在真實環境中的任務執行數據,涵蓋了對常用工具、家居用品、食物等多種物體的精確取放、傾倒等操作,以及在不同環境條件下實現泛化執行。
1、多模態+高質量+萬級體量:萬級真機訓練數據,包含專門針對手部任務的模仿學習數據,適配多自由度靈巧手任務;

2、VLM標注+人工核驗:所有數據均采用視覺語言模型(VLM)進行自動標注,并通過人工二次核驗,確保數據精度與準確性。
全球首個全流程工具鏈,降低研發門檻
除了數據集的開源以外,傅利葉同步開放了全球首個包含采集算法、訓練算法以及數據部署算法的全流程工具鏈,最大程度上與全球開發者共享研究成果。開源的訓練框架(如DP、ACT、iDP3)和部署工具,進一步降低了人形機器人技術研發門檻。

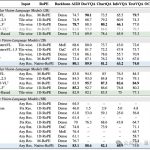
- 自帶數據質量評估:基于擴散策略(DP)、Transformer動作分塊策略(ACT)及改進3D擴散策略(iDP3)對數據集進行系統性驗證,在GRx全系列機型中均可穩定執行開柜門、抓取檸檬、傾倒豆子等高難度任務;
- 配套開發工具支持:同步開源基于LeRobot生態的DP、ACT、iDP3等主流訓練框架和部署框架,提供從數據管理到算法部署的全流程支持。
共建開源生態,推動技術共享
目前,傅利葉已與國內外20多家頂尖科研院校及行業領軍企業開展合作,基于GRx人形機器人平臺在強化學習、模仿學習、VLM大模型、感知系統等研究領域產出多項突破性成果。此次數據集開源標志著傅利葉從技術攻堅向生態共建的戰略升級,未來還將持續開放更多覆蓋全身運控、多任務協同的進階數據模塊。

傅利葉始終致力于推動人形機器人開源生態建設,助力全球機器人技術共享與創新。我們誠邀所有對人形機器人研究感興趣的開發者和科研伙伴加入這一開源浪潮,共同參與數據貢獻與算法優化,迎接機器人技術賦能未來的無限可能。
獲取方式:
- Fourier ActionNet開源鏈接:https://action-net.org/
- 開源生態合作:gr_opensource@fftai.com