理想汽車,認(rèn)錯了
側(cè)向是傳感器盲區(qū),車主須特別關(guān)注
賈浩楠 發(fā)自 凹非寺
量子位 報(bào)道 | 公眾號 QbitAI
承認(rèn)L2能力有不足,承認(rèn)汽車硬件設(shè)計(jì)存在缺陷。
這就是理想汽車最新媒體溝通會上,其CEO李想對兩大爭議性問題的回應(yīng)。
這些回應(yīng),分別對應(yīng)今年在網(wǎng)絡(luò)上引起關(guān)注的三類理想汽車事故:
青島自動駕駛事故、6起斷軸、高速擊穿底盤。
說明和回應(yīng)的同時(shí),理想也給出了相應(yīng)的解決方案。
第一大問題:L2自動駕駛能力不足
6月22日的青島理想ONE自動駕駛事故,事后車主披露,當(dāng)時(shí)車輛處于輔助駕駛系統(tǒng)開啟狀態(tài),車速保持在120KM/h左右。
并且在事故發(fā)生過程中,理想ONE系統(tǒng)對前車變道,沒有警示,也沒有減速,等到他發(fā)現(xiàn)接管,為時(shí)已晚,理想ONE右前方撞擊到貨車左后方。
理想官方解釋說:
目前輔助駕駛系統(tǒng)對旁邊車道上車輛變?nèi)胫鬈嚨赖淖R別具有局限性,沒法在旁邊車道車輛并入1/5車身的時(shí)候,將其識別成主要目標(biāo),這也是目前L2級輔助駕駛系統(tǒng)的局限性。
溝通會一開場,理想方面仍然用很長時(shí)間向大家說明L2的局限。
同時(shí)還一再聲明,L2輔助駕駛不等于自動駕駛,更不等于無人駕駛,車主仍然要謹(jǐn)慎使用。
具體到理想ONE車型上,L2系統(tǒng)對于主要目標(biāo)的認(rèn)定,還不全面。
主要目標(biāo),就是理想自動駕駛系統(tǒng)ADAS控制車身方向、加減速的主要參照對象和決策依據(jù),一般是本車道前方的其他車輛。
側(cè)前向的目標(biāo),系統(tǒng)一般不會識別為主要目標(biāo),所以也不會將它作為決策參考。
理想方面解釋,這個不足是L2算法本身的局限,并且還會受到天氣、硬件、等因素影響。
對于這個不足,理想的方案是貨車碰撞預(yù)警。
貨車碰撞預(yù)警的主要功能,是對于車輛旁邊車道上的大型目標(biāo),比如中大型卡車、客車等,在它們正在變道、或十分靠近車道線有變道可能時(shí),向駕駛員發(fā)出蜂鳴警報(bào)。
在碰見車身寬度巨大、可能影響安全駕駛的大車時(shí),也會發(fā)出警報(bào)。
這套系統(tǒng)的工作條件是自適應(yīng)巡航和車道開啟的狀態(tài)下,且時(shí)速處于60-135公里區(qū)間。
此外,理想自動駕駛總經(jīng)理郎咸朋還提到,目前這個功能策略較為保守,實(shí)際使用中的報(bào)警可能有些頻繁,后續(xù)會改進(jìn)。
10月30日,貨車碰撞預(yù)警,已經(jīng)推送給了車主。
在現(xiàn)場,量子位詢問改進(jìn)過后的貨車碰撞預(yù)警,能否將側(cè)前向大車識別為“主要目標(biāo)”?報(bào)警后又有什么措施?
理想方面回答是:「有一定概率識別為主要目標(biāo)」。
但發(fā)出報(bào)警后,車輛的自動駕駛系統(tǒng)不會采取措施,仍然需要駕駛員應(yīng)對。
所以據(jù)此來看,這個補(bǔ)丁本質(zhì)上是一個報(bào)警器,不具備主動避險(xiǎn)功能。
但為什么不加入應(yīng)對措施呢?CEO李想現(xiàn)場這樣解釋:
任何在前方超過一個車位的側(cè)向車道,系統(tǒng)都能識別出來。但不采取剎車行為,是因?yàn)橐坏┻@樣做,會有非常多的誤剎車,有安全隱患; 目前,至少理想的L2系統(tǒng)是沒有辦法清晰判斷貨車壓線究竟是真要并線、還是僅僅壓線或者來回“畫龍”,所以如果采取“貨車離線很近或者越線一點(diǎn)就急剎車”的話,對正常行駛會造成非常多的誤判。
李想本人承認(rèn),目前的L2局限和邊界還是很多,識別出來沒問題,關(guān)鍵是策略,L2的判斷、預(yù)測能力仍然有限。
但解釋中有一點(diǎn)要注意,他提到的是前方超過一個車位的側(cè)向車道目標(biāo)可以識別,即側(cè)前方。
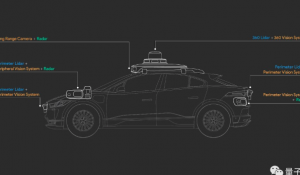
之后,自動駕駛總經(jīng)理郎咸朋,進(jìn)一步回應(yīng)說明了關(guān)于理想ONE車型的傳感器方案:
現(xiàn)在選擇的這套傳感器的配置,側(cè)向是探測的盲區(qū),所以對這個方向的物體需要特別的進(jìn)行關(guān)注,不在探測范圍內(nèi)。
不論如何,貨車碰撞預(yù)警,這個補(bǔ)丁可能不是解決當(dāng)前短板的最根本性方案,但足夠迅速和有誠意了。
第二大問題:10次「斷軸」,承認(rèn)前期設(shè)計(jì)確有缺陷
截止今年10月底,媒體一共報(bào)道了6起理想ONE汽車前懸架的「斷軸」事件。
而溝通會現(xiàn)場,理想又主動披露了另外4起沒被媒體關(guān)注到的相同事故。
10起「斷軸」,共同特點(diǎn)都是前輪在速度較高的情況下突然受力沖擊,導(dǎo)致前懸架下擺臂球頭脫出。
CEO李想承認(rèn),初期產(chǎn)品確實(shí)有缺陷,前懸架下擺臂球銷抗沖擊能力低于其他品牌。
與自動駕駛事故一個月后拿出方案相比,對于斷軸問題的處理,慢了不少。
為此,理想方面特意說明了關(guān)于解決斷軸問題的決策過程:
今年6月之前,總共出現(xiàn)過兩起前懸架下擺臂球頭脫出事故。按當(dāng)時(shí)的交付量計(jì)算,這個故障率與行業(yè)平均水平相同,所以當(dāng)時(shí)并未采取措施。 6月之后,頻繁出現(xiàn)多起相同事故,數(shù)據(jù)明顯高于同行。這個時(shí)候內(nèi)部開始重新評估,并承認(rèn)6月份的結(jié)論有誤,于是給出了新的替換方案。
理想汽車的補(bǔ)救措施是:免費(fèi)幫所有車主更換加強(qiáng)的前懸架下擺臂球銷。
新的下擺臂球銷,能承受的最大脫出力由原來的35KN提高到50KN。
理想汽車銷售服務(wù)副總裁劉杰說,50KN的水平,在同級別車型中已經(jīng)屬于中上水平,所有事故中的目標(biāo)是能夠降低到3%以下的脫出率。
但因?yàn)槭鹿是闆r區(qū)別太大,沒有辦法給出具體某個數(shù)值時(shí)速下的某種類型事故會造成脫出。
即使時(shí)速并沒有那么高,但是輪子的受力角度和受力面積不同,所以產(chǎn)生的撞擊力仍然有可能很大的。
底盤防護(hù)不足,承諾免費(fèi)升級
另外,理想還對另一起曾受關(guān)注的事故,給出了回應(yīng)。
今年8月,廣東的一輛理想ONE在高速路上以115公里時(shí)速行駛時(shí),路上的一塊鐵皮被卷進(jìn)底盤,擊碎了高壓油管,造成起火。
對此,理想在會上承諾為所有車主免費(fèi)更換強(qiáng)度更高的底盤后護(hù)板。
總結(jié)一下,“查缺補(bǔ)漏”,是11月1日理想這場「軟件更新說明會」的主題。
圍繞這一年多以來理想ONE三類事故,官方分別給出了對策。
分別是自動駕駛系統(tǒng)識別缺陷、“斷軸”隱患,和底盤防護(hù)不足。
暴露出來的這三個問題,也分別對應(yīng)了今年在網(wǎng)絡(luò)上引起廣泛討論的青島理想自動駕駛事故、6起斷軸事故、高速擊穿底盤事故。
車輛硬件缺陷,理想承諾為所有車主免費(fèi)更換升級。
自動駕駛方面的不足,還沒有辦法完美解決,但拿出了一個可用的解決方案。
如此行動,是否夠真誠,具體就看真金白銀掏了錢的車主們是否買賬了。
理想汽車穩(wěn)不穩(wěn)?懸念留在兩年后
理想汽車坦承問題,無論是機(jī)械方面,還是智能化方面。
但,一個“樸實(shí)無華”的貨車預(yù)警補(bǔ)丁,反映出的問題,還是理想自動駕駛系統(tǒng)的硬件局限。
理想ONE使用的是水平視角52o的EyeQ4版本——而不是視角更大的100°版本;
另一方面,在用于高速長距離探距的毫米波雷達(dá)方面,理想ONE只用了1個——作為對比,蔚來用了5個,威馬用了3個,小鵬G3用了3個。
說明會現(xiàn)場,李想本人也確認(rèn),理想ONE車型的自動駕駛硬件,暫時(shí)不會再更新。
這也能理解,畢竟前裝量產(chǎn),涉及的環(huán)節(jié)太多,可能需要等到計(jì)劃兩年后面世的下一款車才能硬件補(bǔ)強(qiáng)。
不過即便如此,車主對于理想,還是給予了足夠的支持和肯定。
量子位在現(xiàn)場與參會的車主聊過之后發(fā)現(xiàn),他們對于理想ONE給到的體驗(yàn)還是較滿意的,無論是車本身還是智能化。
而且對于直面事故的方式及解決方案,也比“車主使用不當(dāng)”之類的說辭,人性化得多。
現(xiàn)場,也有人問到了上市后股價(jià)的問題。
李想說,早已財(cái)務(wù)自由,對股價(jià)起伏心態(tài)很好,股價(jià)是由企業(yè)基本面決定的,而車企的基本面是銷量和收入決定。
我們只能把這兩個核心做好
- 商湯Seko2.0重磅發(fā)布,合作短劇登頂抖音AI短劇榜No.12025-12-15
- 商湯Seko上線一個月,超10萬創(chuàng)作者選擇它2025-09-29
- 戴爾 x OpenCSG,推出?向智能初創(chuàng)企業(yè)的?體化 IT 基礎(chǔ)架構(gòu)解決方案2025-12-10
- 看完最新國產(chǎn)AI寫的公眾號文章,我慌了!2025-12-08
相關(guān)閱讀





22個月交付11款產(chǎn)品 顧維灝中關(guān)村智能汽車論壇揭秘“毫末模式”
毫末智行從2019年12月成立,經(jīng)過短短22個月的狂奔,已經(jīng)給長城汽車、美團(tuán)、物美多點(diǎn)、阿里達(dá)摩院小蠻驢等合作伙伴共交付11款產(chǎn)品,乘用車行駛里程突破100萬公里;未來三年將搭載乘用車超100萬臺;預(yù)計(jì)將于2021年第四季度交付上線行業(yè)領(lǐng)先的 NOH 智慧領(lǐng)航系統(tǒng)······成為行業(yè)創(chuàng)新排頭兵。