
量子位智庫 | 公眾號 AI123All
2024年的創投風口賽道是什么?
各種風向標顯示,具身智能機器人,都是名列前茅的火熱之星,甚至在2024上海世界人工智能大會(WAIC 2024)現場,最受矚目的也是具身智能機器人。

實際上,不止在WAIC 2024上,具身智能賽道今年以來新動態不斷,屢屢在科技圈掀起廣泛討論。
谷歌發布了RT系列最新機器人模型RT-H,英偉達在GTC大會上推出了人形機器人通用基礎模型Projoject GR00T,特斯拉擎天柱(Optimus)機器人從疊衣服、散步到進廠“打工”,就連OpenAI也宣布時隔四年重新組建機器人團隊……
除了這些頂流大廠,初創公司更是參與和推動具身智能熱潮的主角。近年不斷有頂級院校和科技巨頭AI/機器人實驗室等出身的專家創立具身智能公司;創業公司們頻繁更新自家機器人產品的demo視頻;具身智能賽道融資狀態火熱,明星創企單輪融資額破億屢見不鮮,整體估值水漲船高。
為了呼應市場關切,也為了對具身智能創投做階段性梳理,量子位智庫正式推出最新報告——
《中國具身智能創投報告》。

在該報告中,量子位智庫對具身智能的背景現狀、技術原理與路線、國內創業格局、融資情況及代表創企、創業者背景等方面進行了梳理,提供系統化參考。
具身智能背景現狀
具身智能定義
根據中國計算機協會的定義,「具身智能(Embodied AI)」是一種基于物理身體進行感知和行動的智能系統,它通過智能體與環境的交互獲取信息、理解問題、做出決策并實現行動,從而產生智能行為和適應性。
值得注意的是,本篇報告研究的「具身智能」以通用智能機器人載體為主,不包含無人車等物理形態。
具身智能機器人與普通機器人的區別主要集中在自主性、感知與交互能力、學習與適應能力、應用場景等方面。

具身智能火熱現狀
具身智能在產業端和學術端都有成果顯現。
產業端——科技巨頭布局具身智能生態
- 英偉達今年2月宣布成立GEAR(Generalist Embodied Agent Research)實驗室,專注通用具身智能體研究;在3月的GTC大會上,英偉達發布人形機器人通用基礎模型Project GR00T,以及專為人形機器人打造的新型計算平臺Jetson Thor。
- 微軟不僅和英偉達、OpenAI一起投資了具身智能明星創企Figure AI,今年5月還與仿人機器人公司Sanctuary AI達成合作,為其提供Azure云資源、加速具身AI研究。
- OpenAI與Figure、1X Technologies 等公司合作開發機器人大模型,并將視覺語言模型加持在Figure 01人形機器人上;同時時隔四年重新組建了自己的機器人團隊。
學術端——高校機構研究具身智能系統
- 斯坦福大學李飛飛團隊推出VoxPoser,基于環境信息和自然語言命令,通過大語言模型和視覺語言模型的交互,指導系統為機器人生成相應的操作指示地圖。李飛飛教授今年也發起「空間智能」方向的創業項目,目標讓AI像人類一樣對視覺信息進行高級推理。
- 卡內基梅隆大學研發出OmniH2O(Omni Human-to-Humanoid)全身遙控系統,實現全尺寸人形機器人的實時全身遠程操作,并用宇樹科技的H1-ReS人形機器人做了效果演示。
- 北京大學推出一系列具身智能研究成果,包括具身導航系統DiscussNav、具身大模型ManipLLM、機器人多模態大模型RoboMamba等。
具身智能火熱原因:大模型及生成式AI的快速發展
具身智能(Embodied AI)的概念早在1950年就由艾倫·圖靈提出,但一直以來被大眾看作象牙塔內的學術研究方向,直到近兩年隨著人工智能技術的進步,尤其是大模型及生成式AI的發展,人們逐漸看到具身智能實際應用的可能性。英偉達CEO黃仁勛和斯坦福李飛飛教授等產業界和學術界的旗幟性人物紛紛為具身智能站臺,越來越多的人相信具身智能將成為「人工智能的下一個浪潮」。

具身智能技術原理與路線
技術原理
具身智能本質上是為以機器人為代表的物理實體注入人工智能,使其能感知、學習并與環境動態交互。

技術路線
1、具身智能的算法方案可分為分層決策模型和端到端模型兩種路線。
- 分層決策模型
以「Figure 01」為代表,將任務分解成不同層級,以多個神經網絡訓練,再以流程管線的方式組合。Figure 01頂層接入OpenAI的多模態大模型,提供視覺推理和語言理解;中間層神經網絡策略作為小腦進行運動控制并生成動作指令;底層機器人本體接受神經網絡策略的動作指令,進行控制執行。

Figure 01線程
分層決策模型的缺點是:不同步驟間的對齊和一致性需解決。
- 端到端模型
以「Google RT-2」為代表,通過一個神經網絡完成從任務目標輸入到行為指令輸出的全過程。首先在大規模互聯網數據預訓練視覺語言模型,然后在機器人任務上微調,結合機器人動作數據,推出視覺語言動作模型。RT-2不僅負責最上層的感知與規劃,還參與中下層的控制與執行,打通了端到端的鏈路。

RT-2模型控制流程
端到端模型的缺點是:訓練數據海量、消耗資源巨大、機器人執行實時性差。
2、具身智能的訓練方法可分為模仿學習和強化學習兩種路線
- 模仿學習
模仿學習是指智能體通過觀察和模仿專家(經驗豐富的人類操作者或具有高級性能的系統)的行為來學習任務。
模仿學習優勢在于可以快速學習專家策略,無需復雜的探索過程。劣勢則是學習到的行為策略受限于專家數據,對于未見過的情況泛化能力較差。
- 強化學習
強化學習是指智能體通過與環境的交互來學習最佳行為策略,以最大化某種累積獎勵。
強化學習優勢在于能夠通過探索環境學習未知的策略,處理高度不確定和動態變化的環境,劣勢則是需要大量的探索和試錯,學習過程緩慢,且對于復雜任務,設計合適的獎勵函數難度較高。
3、具身智能的數據采集可分為基于仿真環境數據和基于真實世界數據兩種路線。
- 基于仿真環境的數據采集
基于仿真環境的數據采集,也即Sim2Real(Simulation to Reality),是在仿真環境中學習技能和策略,并遷移到現實世界中。
其優勢在于數據可大規模獲取,成本低,劣勢則是對仿真器要求高,仿真環境與真實世界存在差異,且遷移過程中存在性能下降的情況。
- 基于真實世界數據采集
基于真實世界數據采集,是直接從現實世界數據中學習,包括本體采集、遙操作、動態捕捉、視頻學習等方式。
其優勢在于數據更真實可靠,劣勢則是真實世界數據少、泛化性差,且往往通過機器本體和人采集,成本高、難度大、效率低。
國內具身智能賽道創業格局
具身智能浪潮主要參與者
國內具身智能浪潮的主要參與者包括科技大廠、傳統機器人公司和新生代的具身智能創業公司等。其中,數量眾多的創業公司們正將最前沿學術研究與產品研發相結合,為具身智能市場釋放無限想象力。
1、科技大廠
- 阿里通義千問聯合有鹿機器人發布具身智能大模型LPLM。
- 百度為優必選的人形機器人Walker S接入文心大模型。
- 騰訊通過RoboticsX機器人實驗室持續研究多模態大模型與機器人的融合。
- 華為成立具身智能創新Lab且與樂聚機器人合作發布盤古具身智能大模型。
- 小米成立獨立的人形機器人公司,推出Cyberone機器人。
2、傳統機器人公司
- 優必選推出面向工業領域的人形機器人Walker S。
- 宇樹科技發布通用人形機器人H1。
- 傅利葉智能發布通用人形機器人GR-1。
- 達闥機器人發布搭載云端大腦的人形機器人XR4。
- 樂聚機器人發布搭載開源鴻蒙系統的人形機器人「夸父」。
3、具身智能創業公司
近兩年不斷有AI頂級院校和科技巨頭AI/機器人實驗室出身的專家學者創立或參與創立具身智能企業。
這些初創公司技術實力優越,吸引無數投資,帶來更密集的具身智能機器人產品動態更新,是參與和推動這次具身智能浪潮的重要主角。
具身智能創業公司分類及圖譜
具身智能創業公司可分為機器人本體(整機)研發商、機器人大模型研發商和機器人數據及系統方案供應商。

具身智能融資梳理
國內創企融資及產品進展梳理


按最新融資所在輪次從后期向前期排列
國外創企融資及產品進展梳理
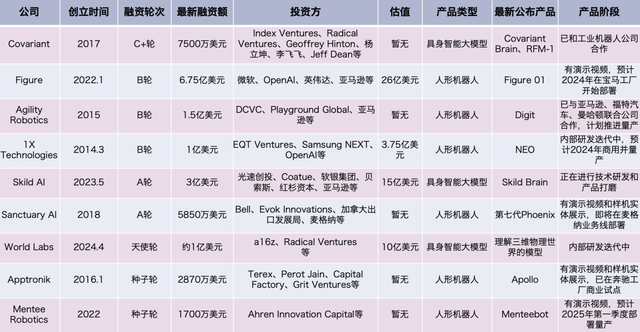
按最新融資所在輪次從后期向前期排列
國內外具身智能創企特色鮮明
1、相同點
- 國內外具身智能創企背后的投資方往往都有科技大廠參與。
創業公司與微軟、英偉達、OpenAI、阿里巴巴、百度等行業巨頭一拍即合,主要是因為其在研發、實驗過程中持續的資金需求,以及對算力、數據、模型等資源的需求,與科技巨頭公司自身對于前沿AGI方向的布局,以及自身業務生態的能力十分匹配。
- 國內外具身智能廠商都選擇率先在汽車制造業務中嘗試部署機器人。
一是因為潛在需求強,汽車制造流程(尤其是總裝環節)有較高的人工成本,長遠來看機器人替代有助于降低成本、緩解勞動力緊缺情況,二是因為汽車工廠提供了豐富的實際應用場景,有助于機器人收集數據,進行學習和優化。
- 國內外研發機器人整機的創業公司數量都多于專注機器人大模型及數據領域的創業公司。
整機研發更能形成鏈路閉環,通過機器人本體在物理環境中的部署,自主采集現實數據,再不斷地更新算法模型,優化機器人本體的任務執行。
2、不同點
- 與國外具身智能企業相比,國內創企的融資輪次尚處早期。
國內具身智能市場仍處于相對早期的發展階段,許多初創公司仍在探索和驗證其商業模式的可行性。
- 國內具身智能創企的機器人產品在實際商業環境中進行部署嘗試的節奏較慢。
國內制造業的勞動力缺口暫時可控,機器人替代需求并不急迫,同時普通制造企業對機器人在工廠環境工作的失效成本較為審慎。但以優必選Walker S接連合作蔚來、東風柳汽、一汽大眾為示范,國內具身智能機器人正在汽車制造、商超及藥房分揀補貨等場景加速落地。
具身智能創業者背景溯源
創業者學術背景
對具身智能領域的創業者而言,深厚的學術背景往往更是公司在創始階段取得成功的重要因素。當我們遍覽國內知名具身智能創企的創始人們,發現幾乎每位創始人或聯合創始人都出自業內頂尖院校,且師承相關領域的專家學者。在小小的學術圈子里,創業者們產生了或多或少的交集。
在這些培養出諸多具身智能創業者的頂尖院校中,清華大學、斯坦福大學、普渡大學等派系格外引人注目。
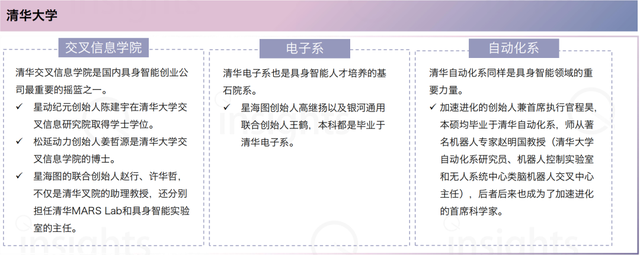

根據當事人訪談、學校官網、領英等互聯網公開資料整理
創業者產業背景
在百花齊放的具身智能創業浪潮中,不少創業者除了深厚的學術背景,還有過豐富的產業經歷。其中,在智能機器人、自動駕駛兩個領域有過從業經歷的創業者擁有得天獨厚的條件,他們將機器人運動控制技術積累或自動駕駛技術架構遷移到具身智能機器人身上,是具身智能創業的骨干力量。
1、智能機器人背景
- 星塵智能創始人來杰以及聯合創始人戴媛均出身于騰訊RoboticsX機器人實驗室。
- 眾擎機器人創始人趙同陽曾擔任小鵬旗下智能機器人公司鵬行智能的總經理。
- 艾歐智能創始人陳相羽則在Robotics X和鵬行智能都有過工作經歷,分別負責過四足機器人Max和可騎乘智能機器馬的項目。
- 穹徹智能由通用智能機器人公司非夕科技孵化,穹徹智能的核心創始人也是非夕科技的創始人及高管。
- 銀河通用聯合創始人姚騰洲曾就職于ABB機器人研發中心。
2、自動駕駛背景
- 有鹿機器人的創始人陳俊波博士之前在阿里巴巴達摩院擔任自動駕駛實驗室的負責人。
- 智平方科技創始人郭彥東博士曾擔任小鵬汽車的首席科學家,負責智能車AI視覺及感知相關的研發及應用。
- 星海圖創始人高繼揚先后在自動駕駛公司Waymo與Momenta工作,將自動駕駛技術架構與具身智能技術架構聯系起來。
- 雅可比機器人創始人邱迪聰曾在自動駕駛初創公司ISEE AI工作,研究自動駕駛中行為決策與動作規劃和認知科學的結合。
總結
具身智能前路雖遠,光明已現
- 具身智能創業公司百花齊放,越來越多頂級院校具身智能領域的專家學者,以及科技公司AI/機器人/自動駕駛實驗室的產業從業者,正在投入具身智能創業的浪潮。
- 具身智能整體火熱的融資狀態短期來看有望延續,但因為產品研發投入高、應用落地周期長,資本未來可能集中于成功可能性更高的頭部明星創企,行業馬太效應隨時間推移而加劇。
- 具身智能機器人公司預計今年年內開始推進各自產品在汽車工廠、商超等實際生產環境中部署和收集數據,從而推動下一階段的小規模量產和正式商用。
- 具身智能創業公司在技術路線上會繼續結合仿真數據和真實數據訓練機器人。專注于具身大模型(大腦)、運動控制算法(小腦)、人形機器人本體及零部件(身體)的不同企業,會共同促進具身智能技術的更新與迭代,加速實現具身智能機器人在實際場景中的應用。
參考鏈接:
[1]
https://x.com/adcock_brett/status/1767913955295744449
[2]
https://robotics-transformer2.github.io/assets/rt2.pdf
完整報告下載地址:
https://jkhbjkhb.feishu.cn/wiki/W5D7wuDcbiPXDLkaRLQcAJpOn8f?fromScene=spaceOverview




