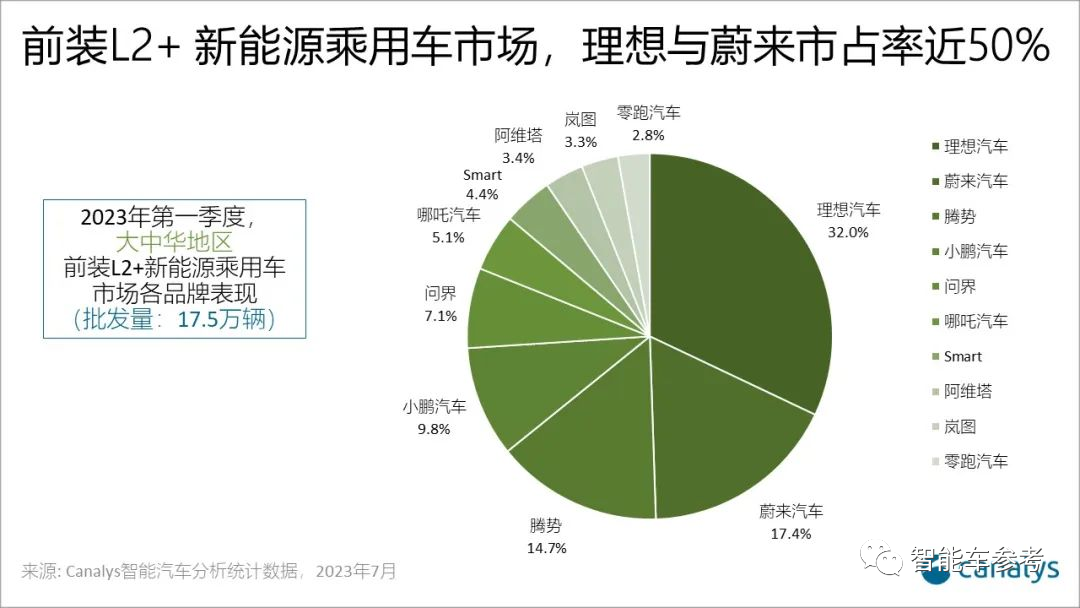
地平線城市NOA首發:征程6平臺,自研端到端算法,已進第一梯隊
智駕硬件Tier 2一哥地平線,為啥「越俎代庖」搞起了算法軟件?
賈浩楠 發自 副駕寺智能車參考 | 公眾號 AI4Auto
地平線“顛覆”地平線。
新智駕硬件征程6系列發布,遠遠超出了“硬件”范疇:
首次同時發布了一整套基于征程6的高階智駕方案,基于端到端和數據驅動的技術范式。

創始人余凱博士給出的評價是:擬人化、真可用。
智駕硬件Tier 2一哥地平線,為啥「越俎代庖」搞起了算法軟件?余凱這么解釋……
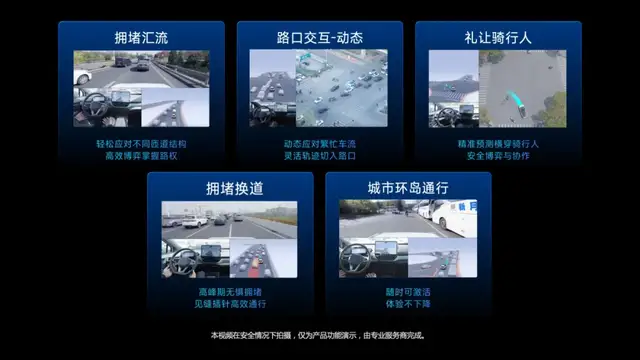
SuperDrive首秀:老司機般的熟練度
SuperDrive官方定義為“全場景”高階智駕解決方案,也就是在功能上覆蓋高速NOA、城市NOA以及自主泊車等主流智駕場景。地平線希望通過打造基于征程6的高階城區智駕軟件行業標桿,發揮示范效應,牽引高階落地。
不過官方重點展示的是城市NOA,因為2024年高速NOA、自主泊車場景挑戰已經不大。談高階智駕的普及、痛點等等問題,都是圍繞城市NOA展開,更是所有玩家競爭決勝的焦點。
高速 NOA 中的困難場景,如擁堵匯流等,也是城區場景的常見場景。

這個場景中除了避讓行人,挑戰更大的是不規則路口右轉。
路面的自行車道和機動車道之間沒有明顯間隔,從HMI界面中看到,系統憑一小段不連續柵欄就準確識別了可通行區域。
避讓的過程,地平線形容為“優雅”,也就是沒有急促的剎車、猛打方向這樣的動作:

這說明在感知和規控兩個層面,SuperDrive的實力都很強。
比避讓目標更加復雜的,是環島的駛進駛出,分成兩個片段解析:

完成了這么幾個厲害的動作:
環島入口被大客車違停擠占,綠化帶進一步侵占可通行區域,SuperDrive不拘泥于地上劃線,靈活繞行,這是通行效率的體現。
安全性上,SuperDrive進環島同時,還避讓了一輛低速兩輪車。
環島中通行時,妥善避讓了一對在路中央停車落客的行人。
第三個場景絕對算是高難度corner case,畢竟在環島里面停車上下乘客的“迷惑操作”,實在太危險也很罕見。
這里面還有一個感知上的難題。以往“白名單”機制做感知的智駕系統,可以識別單獨的車、單獨的人,但“人在車邊”往往會成為系統的盲點,由此也引發過被廣泛關注的事故。
駛出環島的路口,有大量逆行的自行車:

SuperDrive在這個場景下的表現,說明地平線已經突破了過去以規則驅動為主的自動駕駛技術體系。
最后再來看看SuperDrive表現最驚艷、最重要的場景——變道。
旁車道空間不足,多數系統會放棄變道或減速等待,但SuperDrive能根據前方空間條件主動加速,創造變道機會:

以及在密集的車流中,對于轉瞬即逝的變道空間,SuperDrive“瞅準機會”干凈果斷完成變道:

其余的像是向快車道變道、匯出匯入變道等等手到擒來,對SuperDrive基本不構成挑戰:

為什么把變道這個看似簡單的功能重點強調?
因為用這在技術體系上,變道是直接區分水平高下的試金石;用戶層面,它是智駕“可用”與否最關鍵的因素。
簡單說,現在市面上幾乎所有量產交付的“高階”智駕系統,在變道的規劃和執行層面根本不是神經網絡,而是人工手寫定義的規則:十分緩慢的速度、十分平滑的角度切入。
很謹慎很禮貌,但問題是,道路上很少有人愿意主動讓行,尤其是節奏快的一線城市。
這就造成各種發布會上“遙遙領先”的智駕系統,在城市環路、多車道穿行場景下變得“弱智”:
因為“不跟慢車”的邏輯頻繁做出變道決定,又因為僵硬刻板的變道方式屢試屢敗,最后只能提示接管…
或者是在環路、高速出口一邊蠕行一遍等變道機會,最終還是錯過出口。
智駕體驗支離破碎,本來是讓你減負的系統,現在讓你更加費心費力的監督矯正。
問題就出在不夠擬人,很難在復雜交通流下與多個不同交通參與者協同
地平線余凱博士是行業內第一個站出來戳破“皇帝新衣”的人,對當下量產城市NOA的評價是:慫、莽、急、貴,不可用。
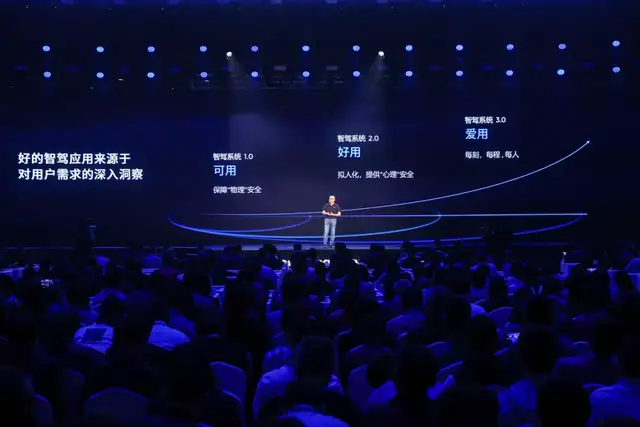
這也是為什么智駕硬件供應商地平線要搞一套智駕系統:
用數據替代手寫規則,讓神經網絡直接學習人類成熟司機的駕駛方法來應對復雜場景,找一條徹底解決城市NOA量產普及問題的路徑。
具體方法是這樣的…
SuperDrive如何達成更擬人的體驗?
兩個最主要的技術手段:端到端感知架構,以及數據驅動的交互式博弈算法。
一個是為了智駕系統看的更清楚更明白,一個是讓智能代駕的“腦子”更靈活更高效。
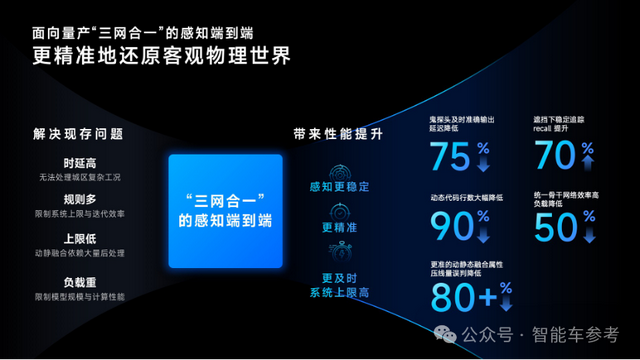
端到端感知架構的優勢,是避免了模塊化算法架構中,數據多級傳遞造成的“損耗”,算法模型一端直接輸入傳感器數據,另一端直接輸出軌跡預測,包括本車的,也包括道路其他交通參與者的。
端到端體現在SuperDrive將動態、靜態、OCC(Occupancy占用網絡)三網合一,統一在一個Transformer架構下,不需要對感知數據進行抽象和逐級傳遞,“所見即所得”:實現感知端到端同時,又保證了每個子網絡的可解釋性。
實際上SuperDrive的算法基礎,正是來自于智能車參考前幾天剛介紹過的CVPR 2023最佳論文成果——UniAD,地平線學者一作。
動態、靜態、Occupancy三網合一的感知端到端架構下,有效解決感知架構時延高、規則多、負載重的問題。
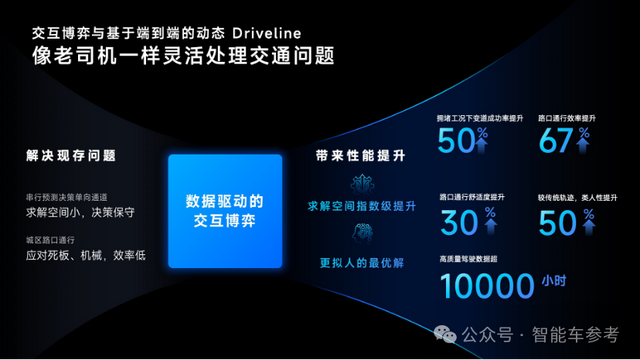
感知端到端網絡輸出的結果,會接著進入數據驅動的交互博弈算法,這一算法也是基于蒙特卡洛樹搜索的端到端深度學習算法。
名震一時的圍棋AI AlphaGo背后的主要技術之一就是蒙特卡洛樹搜索。簡單來說,它的基礎是一個概率模型,所要求解的問題是某種事件出現的概率。
在智駕場景中,這個“概率”可以是對象來車軌跡、前車變道意圖、變道時多個目標的運動軌跡等等…
蒙特卡洛樹搜索會通過某種“試驗”的方法,得到這種事件出現的頻率,或者這個隨機變數的平均值。
試驗方法,可以是人為定義,不過地平線選擇的是通過10000小時高質量駕駛數據來訓練,讓算法最大程度理解效仿人類老司機的駕駛方法。
這就是上面例子中SuperDrive果斷干脆變道的技術核心。
算法之外,SuperDrive“擬人化”體驗仍然離不開地平線軟硬結合的實力——最新發布的征程6系列計算硬件,CPU、BPU、GPU、全功能的MCU四芯合一。
單顆征程6旗艦即可支持感知、規劃決策、控制、座艙感知等全棧計算任務。同時,高集成度令開發難度進一步降低。
SuperDrive搭配征程6旗艦版,BPU納什架構是核心:
獨特設計三級片上存儲架構,核間高效協同,極致優化大參數下的帶寬瓶頸;
具備多脈動立方加速引擎,靈活的引擎間數據流動實現高能效且低帶寬占用;
數據變換引擎,靈活支持Transformer細小算子;
浮點向量加速單元,具有通用、靈活的特性,滿足關鍵算子精度需求;
緊耦合異構計算單元高效加速不同類型數據處理;
核內、核間、片間高效靈活的多向數據流動,實現計算動態調度與靈活調優;
虛擬化技術,透明式提升多任務并行處理能力;數據驅動功耗優化,針對神經網絡數據動態范圍特性,降低功耗30%。
征程6系列目前一共6款產品,征程6B、征程6L、征程6E、征程6M、征程6H、征程6P。覆蓋各個區間智能駕駛需求,算力依次遞增,從數十TOPS一直到數百TOPS。
地平線認為,一個時代有一個時代的計算架構。地平線BPU架構的最新進展,其實就是數據驅動的智能計算架構,支持智能算法軟硬件體系相結合。
在此基礎上誕生的SuperDrive,其實也沒有突破顛覆地平線智能汽車Tier 2的定位本質:
可以量產交付,但更重要的是實踐端到端和數據驅動的新技術范式,以及驗證征程6對這種技術體系的完美支持。
地平線「破壁」城市NOA
SuperDrive當下最珍貴的價值也是這點:
向行業、用戶證明只有在技術體系上重構、變革才能徹底解決城市NOA量產普及問題。
試圖在以前的技術棧上修修補補,通過增加規則用“窮舉法”兜住所有長尾場景,是一條死路。最終只會留下一堆“屎山”代碼和泛化性極差的系統。
用戶用過幾次就勸退的系統,只會成為白白浪費的成本,規模普及無從談起。
因為對于城市NOA來說,智能不徹底,就是徹底不智能。
盡管SuperDrive推出,地平線憑技術體系和功能體驗拿到了城區NOA智能駕駛的門票,并且站穩第一梯隊,但它定位仍然是Tier2,只不過毫無疑問是最全能的Tier2。
SuperDrive因此成為一個樣板間,目的是帶動車企、tier 1盡快向新的技術范式轉移,實現這個目標的基礎,是新的征程6系列。
而從行業格局來看,地平線推出軟硬一體的智駕方案有更深刻的意義:生態正在成為智駕壁壘和護城河。
這體現在自動駕駛正在以底層硬件不同,演化出不同陣營。通用GPU演變過來的英偉達、電子通信領域延伸的高通,以及自主玩家地平線。
地平線的的優勢,恰恰是沒有過往優勢業務的慣性,從智能車和自動駕駛算法演變的角度設計硬件架構,并且在大模型浪潮中,前瞻性的提出專門為端到端模型和數據驅動算法服務的新平臺。
除了自給自足生態封閉的特斯拉以外,地平線征程6是目前唯一的選擇。
而智駕底層硬件“三分天下”,還能從商業角度解讀出趨勢:
地平線堅持Tier2,選擇和所有自動駕駛算法公司共贏。而所有的自動駕駛公司也成為了地平線生態護城河的一部分。
而在在中國所有的智能汽車供應商中,服務能力,客戶廣度,商業潛力…地平線是所有玩家中獨一無二的。
- 中國汽車一哥加持,自動駕駛界「大疆」估值沖破百億2025-11-26
- 神盾金磚電池成功挑戰行業首個“整車+整包”帶電六大極端測試2025-09-02
- 對話吉利技術一號位:VLA大模型打底,沖刺全球最大機器人公司2025-09-02
- 全新嵐圖知音正式上市,20.29萬元起2025-08-28
相關閱讀




海信健身智慧屏X7H搭載地平線旭日3開售,開創移動健身智慧屏新品類
海信全新研發的健身智慧屏X7H搭載地平線旭日?3芯片,實現高效絲滑的屏幕互動健身體驗。