2023廣州車展開幕 如祺出行自動駕駛解決方案首次公開亮相
正在加速推動自動駕駛商業化落地
11月17日,第二十一屆廣州國際汽車展覽會(下稱“廣州車展”)拉開帷幕,如祺出行完全自主研發的自動駕駛解決方案在本屆廣州車展公開亮相。作為國內行業領先的出行科技與服務公司,如祺出行以數據為核心驅動,打造自動駕駛技術閉環迭代平臺,面向汽車制造商、自動駕駛解決方案供應商和傳感器廠商,推出了由數據標注平臺ONTIME Data Encoder、高精地圖工具鏈ONTIME MapNet、智駕仿真平臺ONTIME NexSim三大板塊構成的自動駕駛解決方案,以行業領先的自動駕駛引擎加速自動駕駛商業化。

如祺出行自動駕駛解決方案在2023廣州車展公開亮相
這是如祺出行首次公開展示其完整的自動駕駛解決方案,也標志著繼2022年于全球率先實現有人駕駛網約車服務與Robotaxi商業化混合運營之后,如祺出行在科技轉型戰略上實現又一重大里程碑。

如祺出行以數據為核心驅動打造自動駕駛技術閉環迭代平臺
加速自動駕駛商業化
一站式智能化數據標注平臺 效率提升最高超過500%
在自動駕駛領域,數據標注能夠提高車輛對交通環境識別的準確性、優化自動駕駛算法和決策的可靠性,從而保障車輛行駛的安全和優良體驗。傳統數據標注工藝普遍存在的速度慢、準確率低、人工成本高,以及融合標注能力較弱等問題,成為自動駕駛實現商業化落地需要解決的難題。
如祺出行打造的一站式標注平臺ONTIME Data Encoder,內置感知大模型,集標注工具、預標注模型、項目管理為一體,支持自動駕駛等場景下2D、3D、4D全類別標注,擁有如BEV 4D標注、疊幀時序標法、AI預標注、關鍵幀插值、2D/3D融合標注及自動貼合等先進的標注工藝,智能化提升數據標注效率。

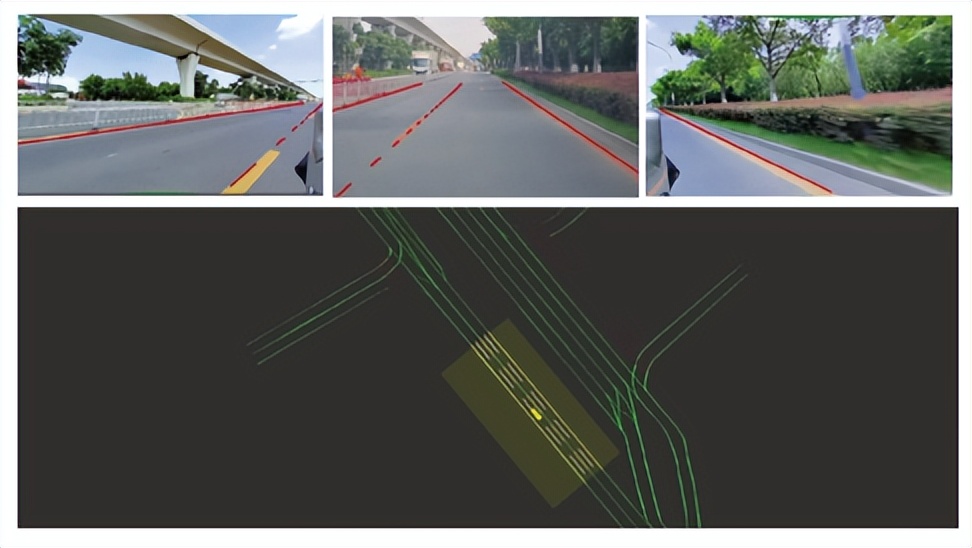
如祺BEV 4D標注工具通過融合時間維度
能為數據分析和模型訓練提供更豐富、準確的數據
在4D標注工藝上,如祺BEV 4D標注工具通過融合時間維度,能為數據分析和模型訓練提供更豐富、準確的數據,相比傳統3D標注,效率提升500%以上;而4D標注-疊幀時序標法則可針對點云中靜止車輛進行疊幀共享標注,大幅減少標注工作量,標注效率提升也超過300%。
在3D標注工藝上,ONTIME Data Encoder內置的如祺自研AI預標注模型,通過千萬幀學習素材,并結合自研模型算法,能快速識別實體對象,實現全幀自動標注和自定義區間標注兩種模式的預標注,從而縮短模型迭代周期。據實際測算,如祺AI預標注功能可幫助企業降低90%的成本,整體標注效率提升超過300%。
此外,如祺在3D標注工藝上還擁有關鍵幀插值和融合標注兩大亮點:在標注完一段點云數據首幀、末幀后,可自動完成對其他幀的標注;點云中的標注內容,能夠自動映射到2D圖片視角,并擁有自動貼合能力,在俯視狀態下可自動貼合車輛。
高精地圖能力+輕地圖路線 有圖無圖都能自動駕駛
隨著高階輔助智能駕駛的爆發式發展,高精地圖的覆蓋度、更新頻率、成本等問題成為行業爭論的焦點,也分化出有圖和無圖的技術路線。
如祺眾源地圖解決方案
以更低成本,更高的更新頻率提升高精地圖鮮度
如祺出行自研的全棧高精地圖工具鏈ONTIME MapNet,包含地圖采集、預處理、地圖生產、母庫地圖質檢、地圖編譯、編譯后地圖質檢平臺以及地圖引擎整套能力,并針對高精地圖鮮度和無圖場景等問題,推出了輕地圖NOP方案,實現有圖和無圖場景下都能實現自動駕駛。
自動駕駛技術的大規模商業化落地,對車輛智駕系統提出了更強的泛化能力要求。如祺基于大模型,構建了BEV在線建圖能力,車輛實時生成“活地圖”,補足自動駕駛決策算法所需的道路拓撲信息,從而形成如祺輕地圖NOP方案和眾源地圖方案。
一方面,如祺輕地圖NOP方案基于“BEV+Transformer”架構,實現多攝像頭、多傳感器的信息融合,利用Transformer大模型的多模態優勢,用更低的算力實現在車端實時構建輕地圖,實現復雜場景或無圖場景下的自動駕駛,從而不依賴高精地圖,使得自動駕駛感知算法泛化性大幅提升。
另一方面,基于出行場景的眾源地圖方案,充分發揮如祺出行平臺的場景和數據優勢,實時車端建圖,以更低成本、更高的更新頻率,提升如祺高精地圖鮮度,為客戶提供更優質的地圖服務。
在高精地圖的繪制中,道路路口因為要素信息較多、無真實引導標識、要素間相互重疊壓蓋等原因,往往需要投入更多精力繪制。如祺高精地圖生產平臺,擁有一系列自動化的制圖工具,如路口車道線自動生成、自動推導車道線等,實現自動化車道線繪制,能夠有效降低高精地圖的生產成本,提升數據鮮度。
多形態仿真場景功能 賦能OEM低成本、零風險驗證技術可靠性
仿真場景是智駕車輛從技術研發、迭代到規模量產各個環節都必不可少的能力。

如祺智駕仿真平臺提供集方案預研、研發迭代、批量測試、
量產裝配等功能為一體的一站式智駕仿真解決方案
如祺自研的下一代智駕仿真平臺ONTIME NexSim,面向L3和L4研發需求,為主機廠、Tier-1及科研院所等客戶提供集方案預研、研發迭代、批量測試、量產裝配為一體的一站式智駕仿真解決方案。該平臺同時具備LogSim、WorldSim及Log2World等多形態仿真場景功能,能夠利用先進的實時車輛動力學、人體動力學仿真、傳感器仿真及六軸云臺等技術,滿足用戶多元化需求,實現降低研發成本和提升智駕產品的安全性、時效性及乘員舒適性等目標。
ONTIME NexSim的LogSim功能,具有行車數據濾波、焦點數據段提取、場景庫自動生成與歸類等功能模塊,可實現通用場景及Corner Case的自動挖掘,還支持用戶通過設置可編程的篩選規則,從海量的行車數據中挖掘出有效場景,形成專屬的自動駕駛場景庫。
由于已知場景庫與測試場地未必能覆蓋智駕車輛上路行駛可能遇到的所有場景,ONTIME NexSim通過WorldSim實現場景自演進,可批量地構造各類極端的場景,從而驗證車輛在場景下的運行情況,賦能主機廠及Tier-1供應商在零成本、零風險的虛擬環境中進行自動化無人值守仿真,快速積累測試里程。
基于物理的傳感器仿真方法,ONTIME NexSim可輸出與當前市面上主流傳感器分布一致的傳感器數據及真值,幫助用戶實現訓練數據集生成、引導訓練、算法檢測,并補充危險、極端場景的傳感器數據。同時,ONTIME NexSim還支持通過高精度地圖生成虛擬仿真世界,從而實現對真實世界的數字孿生,包括模擬各種光照及極端天氣,也支持由導航信息啟發式過程建模,自動化構建地形、高速公路、城市快速路、城市道路等常見路段及周邊建筑,并過程化生成與之匹配的高精度地圖。

如祺出行在2022年于全球率先實現
有人駕駛網約車服務與Robotaxi商業化混合運營
如祺出行深耕出行科技,致力于搭建全方位、立體化的出行科技解決方案及服務體系。近年來,憑借平臺對智慧出行的敏銳洞察,如祺出行充分發揮平臺擁有的豐富場景及海量數據等優勢,不斷加碼布局自動駕駛,面向國內智能汽車產業鏈推出可商業化的解決方案。目前,該方案已為國內多家自動駕駛技術公司、頭部汽車主機廠和智能汽車解決方案供應商提供服務,正在加速推動自動駕駛商業化落地。
- 九章云極獨攬量子位三項大獎:以“一度算力”重構AI基礎設施云格局2025-12-10
- 視頻理解霸榜!快手Keye-VL旗艦模型重磅開源,多模態視頻感知領頭羊2025-11-28
- 中國唯一!阿里千問斬獲全球AI頂會最佳論文2025-11-28
- 第19屆中國投資年會·有限合伙人峰會在滬成功舉辦2025-11-28
相關閱讀