
重感知還是重地圖?其實無需選擇
感知幫助地圖更新,地圖反哺降低感知的壓力,才是王道。
近來,關于自動駕駛應該重感知還是重地圖是個熱點話題,很多重量級車廠、自動駕駛供應商都開始提出重感知輕地圖的方案,并承諾很快能發布出對應的產品。業界也出現了高精地圖已“死”等類似的言論。一時之間,似乎輕地圖已經成為了非常時髦的詞匯,儼然變成自動駕駛技術實力強的代名詞,高精地圖圖商的前景看起來黯淡無光。 對此,寬凳科技這樣看。
無論是高級輔助駕駛地圖,還是高精地圖,都是不同程度的精細化地圖,以下統稱精細地圖。而高級輔助駕駛作為自動駕駛的早期形態,以下也統稱為自動駕駛。
重感知還是重地圖?這是個問題。
但這又不是個問題,因為這兩條路實際是殊途同歸的一條路。本質上其實不是用不用精細地圖的問題,而是如何快速更新精細地圖的問題。業界批評精細地圖,不外乎有兩點:一、政策管控。二、成本太高,更新不快,不好用。政策上大家可見已經在逐漸松綁。而成本太高更新不快的問題,可以通過圖商和車廠合作解決。在未來政策允許的前提下,最合理的路線是利用量產車的眾源流量輸入,實現低成本且實時快速的精細地圖更新,并使用精細地圖提供體驗和安全性最好的自動駕駛服務。
地圖,實際是一種全局范圍的先驗知識,是對現實世界的高度抽象,是數字孿生在地理信息方向上的主要構成。傳統的標精導航地圖將公開道路虛擬抽象成一條條的線。在這些抽象上,又衍生了對導航非常有用的虛擬信息,比如道路之間的拓撲連接關系、通行限制信息等等。
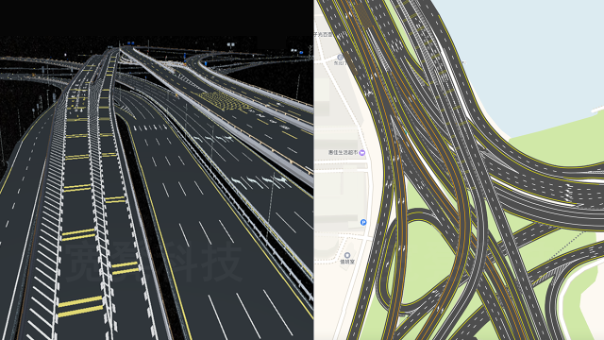
精細地圖則是公開道路信息更豐富、精度更高的抽象和衍生。精細地圖的制作過程,分成兩個層次,實體抽象層和虛擬衍生層。實體抽象層可以精準地表達道路上客觀存在的實體要素,例如車道線、交通燈、交通牌、交通標志等等,而虛擬衍生層則表達了對自動駕駛非常重要的要素,如車道中心線、車道虛擬邊界、車道之間的拓撲連接關系、紅綠燈對車道的進入退出的控制關系等。
隨著自動駕駛的傳感器、算力、技術的大幅提升,在相對簡單的道路場景中,自動駕駛車的感知能力能逐漸很好地感知出實體要素及其位置,但虛擬要素沒法被感知到。而這些虛擬要素,才是提升自動駕駛體驗和安全性的關鍵。自動駕駛在路口對精細地圖有很大依賴,路口內的虛擬車道、進入退出車道關系、連接的合理性、角度等是否符合人類司機駕駛的行為,對自動駕駛車安全通過路口至關重要。城市復雜異形路口,通行關系復雜,路口面積大,感知很難覆蓋完整的路口信息,需要精細地圖給出全局的先驗知識。
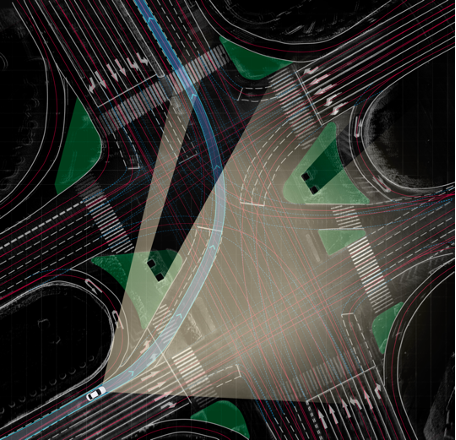
車端感知無法規避復雜路口的障礙物遮擋,只有地圖可以提供完整的先驗知識,保障路口的安全通行
路口的紅綠燈,雖然車端感知可以識別燈態,但是很難判斷燈的作用車道,需要精細地圖給出紅綠燈控制的進入、退出車道,才能順利通過路口。特別是很多城市都有左轉待轉區,或者是高架橋下面大的路口,會有多組紅綠燈控制多個通行方向,沒有精細地圖的輔助,很難識別紅綠燈和行駛路徑的控制關系。路段中,各種岔路口都會有車輛的駛入駛出,有了精細地圖的幫助,可以更有效準確地預測各類交通參與者對自動駕駛車輛的干擾,避免安全事故。 環島,隧道等特殊場景,自動駕駛有不同的駕駛策略,需要精細地圖給出場景的范圍、車道的轉向類型等,觸發自動駕駛不同策略的實施。公交車道、公交停靠站、潮汐車道等都需要精細地圖信息輔助自動駕駛不會駛入不正確的車道。
自動駕駛是一個傳感器、算力、自動駕駛技術、回傳數據,與實現的自動駕駛功能體驗以及安全性的平衡。傳感器越多、算力越強、技術越強、回傳數據越多,自動駕駛功能和體驗越強。而傳感器越多,能在多個傳感器之間互相形成冗余,進一步提升安全性。高精地圖是自動駕駛的唯一一個超距傳感器,可以和感知形成冗余,提升自動駕駛的體驗和安全。理論上說,傳感器和算法也可以互為冗余。傳感器少一些,可以部分通過算法補足。但同等算力和技術水平下,一定是有更多傳感器,自動駕駛體驗和安全性更好。任何一個傳感器,都會有一個逐漸提升的過程,會變的對自動駕駛越來越好用。就像激光雷達,隨著其價格下降,穩定性增強,現在已經變成了高端智駕車的標配。同理,低成本高質量實時更新的精細地圖,一定是提升自動駕駛體驗和安全的。
自動駕駛的發展有兩條路徑
- 漸進式,通過不斷增加傳感器、算力,提升算法水平和數據回傳,在量產車上從L2到L2+,逐步朝著L3、L4推進。
- 激進式,直接上L4。但到目前為止,L4遲遲不能真正量產,很多L4供應商已經轉戰L2+。
目前的情況是,把包括精細地圖在內所有能用的傳感器,足夠的算力,業界最領先的技術,所有能用的都用上,能勉強做體驗不錯且安全的城市NOA,業界已經有成功案例。沒有精細地圖,就需要算法和算力層面做很大的補充,至少業界還沒有人做出來。預期即便有人做出來,體驗和功能也會比使用精細地圖的方案要差一些。而進入L3和L4,沒有精細地圖可能會在可見的未來不現實。
對于技術供應商們,如果使用好的精細地圖還做不出很好的自動駕駛方案,使用無精細地圖方案會更難。在有圖方案上深入,也許在一些相對簡單場景,比如高速和城市的非路口大直路,能去除對精細地圖的強依賴。但對大路口等復雜的場景,仍然非常難。無論是簡單還是復雜場景,使用好的快速更新的精細地圖,總能進一步提升體驗和安全性。
那么,車廠有流量,是否就能替代圖商呢?其實不能,因為地圖是一個高度專業性的行業,制作精細地圖的難度壁壘主要有以下幾點:
- 高度自動化和高精度的實體抽象和測量
- 高度自動化的要素虛擬衍生
- 高級別高度自動化的全局質量保障
- 全國范圍的地圖量產,是對全公司技術、運營、質量控制、組織能力的嚴酷考驗,成功做出全國量產精細地圖的公司的總體能力上了一個大臺階。
- 實體和虛擬要素的實時快速的更新,這是精細地圖的終極考驗。
專業的人做專業的事
目前國內有數家圖商,在數年的技術積累和大量資源投入下,在高速和城市快速路完成了全國精細地圖量產。隨著國家政策的逐漸松綁,城市的精細地圖覆蓋也會逐漸擴大。這幾家圖商在前面幾條上都有不錯的積累,但目前大家在實時更新上都還做的遠不夠,成本控制的也不夠好。想要實現成本可控的實時快速的更新,需要有實時快速的信息源。在這一點上,量產車有天然的優勢。
2022年8月30日,自然資源部發布了《自然資源部關于促進智能網聯汽車發展維護測繪地理信息安全的通知》,明確智能網聯汽車對車輛及周邊道路設施空間坐標、影像、點云及其屬性信息等測繪地理信息數據進行采集、存儲、傳輸和處理的行為,屬于測繪行為。需要從事相關數據收集、存儲、傳輸和處理的車企、服務商及智能駕駛軟件提供商等,應依法取得相應測繪資質,或委托具有相應地圖資質的單位開展相應測繪活動。
感知的結果,一旦存儲或回傳,就需要有相應地圖資質的單位管理,而圖商一般都擁有對應的地圖資質。車廠和圖商合作,在合規的框架下,將流量回傳給圖商,可以讓圖商能低成本實時更新精細地圖,而快速更新的精細地圖,又可以反哺給車廠,提升自動駕駛的體驗和安全性,實現雙贏。讓專業的人做專業的事,共同為用戶體驗和安全出力,是最好的社會分工方式。精細地圖目前確實還不夠好,但是通過圖商和車廠的合作,實現了低成本實時更新,可以變得很好。無論從安全、合規還是用戶體驗角度,現實就是離不開精細地圖,行業可以有信心。
很多人以為TESLA是走的無圖方案,但實際TESLA使用了眾源生成的類似精細地圖。但顯然,其眾源生成的地圖還不夠好,在近期的評測中,Tesla的NOA體驗已經逐漸落后于國內深度使用精細地圖的高級輔助駕駛體驗。一步到位眾源制作精細地圖也許還是太難,圖商先用專業設備制作第一張底圖,再通過與車廠合作獲取的眾源流量低成本實時更新地圖,才是最可行的方法。
??那么,到底是重感知還是重地圖?
小孩子才做選擇題,有實力的成年人當然是都要。這本質就只是個如何快速更新精細地圖的問題,殊途同歸的一條路,其實無需選擇。感知幫助地圖更新,地圖反哺降低感知的壓力,才是王道!
— 完 —
- IDC MarketScape: 容聯云位居“中國AI賦能的聯絡中心”領導者類別2025-12-11
- 九章云極獨攬量子位三項大獎:以“一度算力”重構AI基礎設施云格局2025-12-10
- 視頻理解霸榜!快手Keye-VL旗艦模型重磅開源,多模態視頻感知領頭羊2025-11-28
- 中國唯一!阿里千問斬獲全球AI頂會最佳論文2025-11-28
相關閱讀

寬凳科技連續完成新融資,商業逆勢破局率先規模落地
寬凳科技創辦于2017年,此前已獲得IDG資本等多家機構的數億元融資,此輪新融資將重點圍繞商業規模化擴張所需的研發與市場資源進行投入,擴大市場競爭優勢。


寬凳與全球知名汽車廠商達成合作 提供高精定位與地圖服務
從眾多知名圖商包括行業巨頭中,寬凳脫穎而出晉級為本項目唯一的高精地圖和定位服務供應商,將與該汽車廠商共同推進自動駕駛在中國市場的落地,以便更好地為中國用戶服務。



