北京小哥開發「中國龍形」無人機,最狂的無人機
日本JSK實驗室成果
Pine 發自 凹非寺
量子位 | 公眾號 QbitAI
神龍出世!
這是由無人機組成的一條龍,你敢信嗎?
北京小哥趙漠居開發一款龍機器人「Dragon」,最新一篇論文已經發表在《國際機器人研究雜志》上。

用“無人機”做成的龍,仔細看其實很像個飛行的機械臂,還很靈活的樣子。
它能用來做什么?
話不多說,直接上效果!
這條龍能做什么?
先給大家表演個開閥門的動作。
再來抓個東西。
(可以看到,抓完東西后這條龍還能穩定地懸浮在空中)
你以為停在空中就是它最大的能耐了嗎?這樣想你就大錯特錯了。
這條龍不僅能夠攜帶物體,還能帶著它上下前后移動。
接下來,讓「Dragon」來表演個“雜技”。
(想不到吧,它還能旋轉,而且還是帶著重物)
可以執行這么多功能,這條龍它是怎么做到的?
細究起來,這并不是「Dragon」的“首秀”。(但擁有這么多功能的「Dragon」是真的一次出現)
早在在2018年,「Dragon」就已有了雛形。
因此,要知道「Dragon」怎么做到這些的,得從它的雛形入手。
它在變老,也在變強
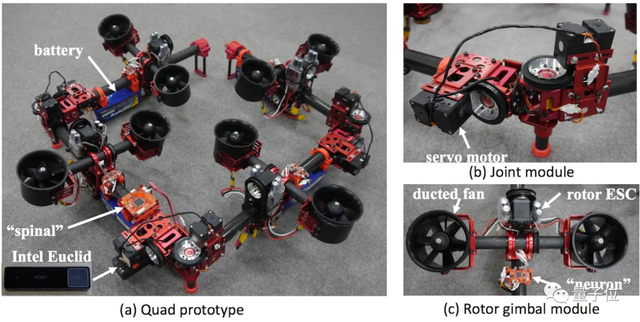
先說「Dragon」的外觀,整體來看,它像是有四個“關節”的龍形機器臂。
在每個關節上,都會有一對管道風扇推進器,它可以控制整個機器臂在任何方向上轉動或者移動。
而各個關節之間由鉸鏈連接,這也是整個機器臂能夠自由活動、變換形狀的基礎。
有了這些構造,似乎還差點什么重要的東西?
沒錯,“大腦”!,可以在「Dragon」雛形機器上看到它搭載了Intel Euclid,Intel Euclid相當于一個微型電腦,「Dragon」與其結合,也就有了運動追蹤感知、環境識別等功能。
大腦是有了,要傳輸想法還得靠神經元,因此每個“關節”上都配備了分布式控制板,以執行大腦的命令。
在一開始,研究團隊設計「Dragon」時,初衷只是讓它“自由變形”,比如說在比較狹窄的空間,它能夠變換形狀以更好地適應環境。并沒有考慮到抓取物體或者其他功能。
但在之后發現了其抓取物體的潛力,并且「Dragon」雛形在穩定性方面做得也不是很好,這才有了后續進一步的研究。
因此,JSK實驗室推出的新一代「Dragon」在原有的基礎上做了一些調整,增加了一些輔助功能并讓整個機器手臂的穩定性大大提升。
比如在執行懸停指令時,新一代的「Dragon」能夠不借助外力穩定地懸浮在空中,而之前的模型在人的輔助之下也很難穩定地懸停。
在新一代的「Dragon」模型上,研究人員首先在原有的基礎之上提出了一種綜合飛行控制方法,綜合考量了矢量驅動器的動力學特性,使整個機器臂在執行操作時更加穩定。
其次,與「Dragon」雛形的外觀相比,新一代的飛行機器臂在末端,還裝有一個類似“手”的東西,有了它就可以執行一些轉動閥門之類的功能。
目前新一代「Dragon」還不是很成熟,整個機器的重量達7.6公斤,雖然可以承重3.4公斤,但它的最長飛行時間卻只有3分鐘。
因此團隊成員稱,目前正在考慮賦予「Dragon」地面行走的能力,或許這可以幫機器臂省下一些電。
團隊介紹
北京小哥趙漠居,他是「Dragon」項目的主要創始人,也是最近一篇論文的一作。
他研究的方向集中在連桿空中機器人上,目前是JSK機器人實驗室合作研究員,也是東京大學工程研究生院機械工程系項目講師。
參考鏈接:
[1]https://spectrum.ieee.org/dragon-robot-flying-manipulator
[2]https://spectrum.ieee.org/flying-dragon-robot-transforms-itself-to-squeeze-through-gaps
[3]https://journals.sagepub.com/doi/10.1177/02783649221112446
- 北大開源最強aiXcoder-7B代碼大模型!聚焦真實開發場景,專為企業私有部署設計2024-04-09
- 剛剛,圖靈獎揭曉!史上首位數學和計算機最高獎“雙料王”出現了2024-04-10
- 8.3K Stars!《多模態大語言模型綜述》重大升級2024-04-10
- 谷歌最強大模型免費開放了!長音頻理解功能獨一份,100萬上下文敞開用2024-04-10