
只需1秒,無人機就能平地翻跟頭 | IEEE
參考甲蟲設計
蕭簫 發自 凹非寺
量子位 報道 | 公眾號 QbitAI
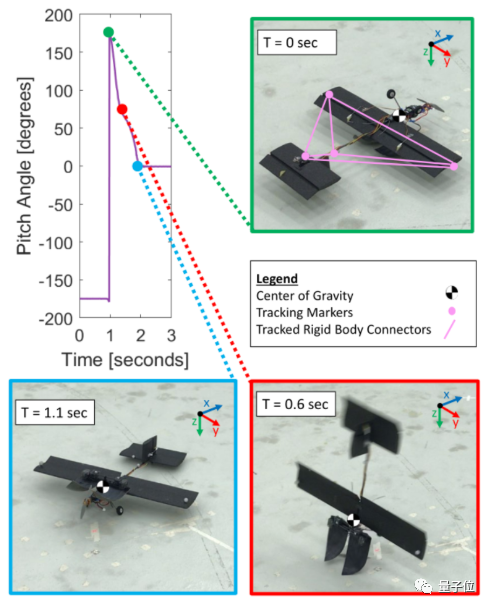
翅膀輕輕一推,無人機翻身只需1.1秒:
迅速旋轉翅膀,調整成能減輕飛行重量的的角度:
在你反應過來之前,它已經“嗖”的一下從地上起飛了:

不僅平地能輕松翻身,碎石地、木屑地、斜坡也能輕松handle,簡直像甲蟲一樣靈活~

目前,這項研究已經登上IEEE。再也不用擔心自己的無人機掉在奇怪的地方了!

披了件甲蟲的“外衣”
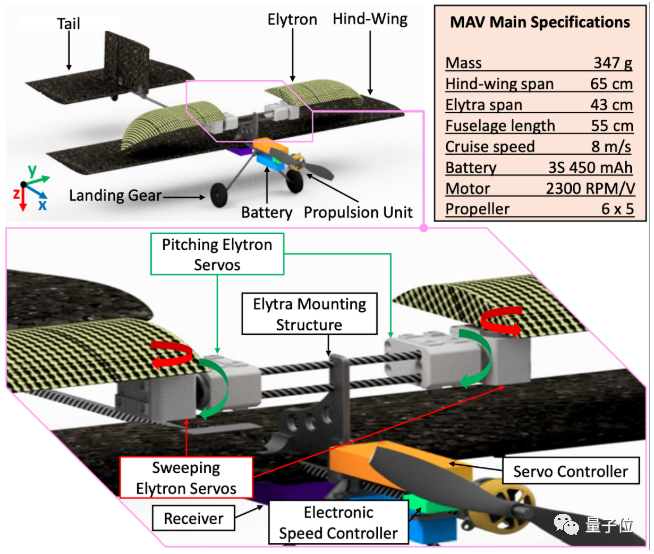
這架無人機,確實也參考了甲蟲,用上了兩對翅膀:鞘翅(elytron)和后翅(hind-wing)。
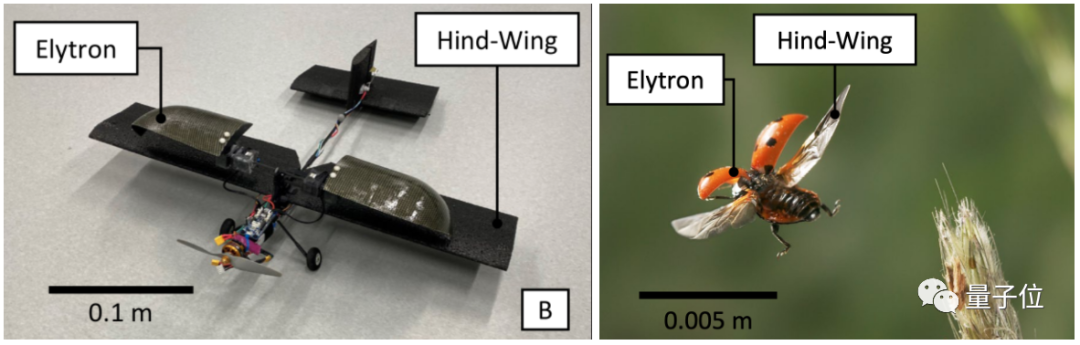
其中,鞘翅主要負責“翻身”、保護機翼和提供上升動力,后翅則主要負責飛行。
下圖是這架無人機的機身構造圖。
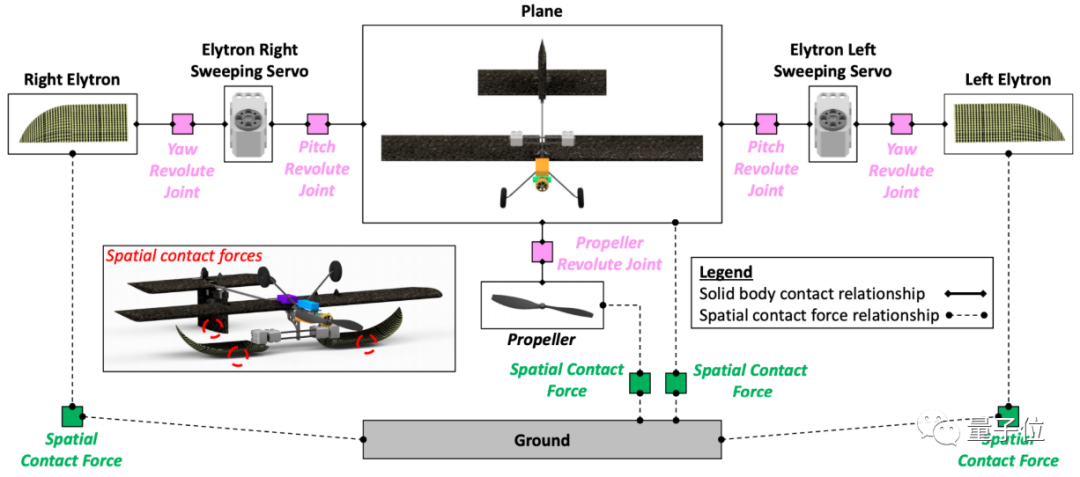
從圖中可見,要控制這對鞘翅,需要用到鞘翅俯仰控制伺服系統(pitching elytron servos)。
伺服系統,用于精確地跟隨或復現某個過程的反饋控制系統,使物體的位置、方位、狀態,能跟隨輸入目標(或給定值)進行靈活變化,能有效調節力矩、速度和位置。
其中,伺服系統主要依靠伺服電機提供動力,控制鞘翅做出扭轉或平移的動作來。
無人機的其他部件參數如下:
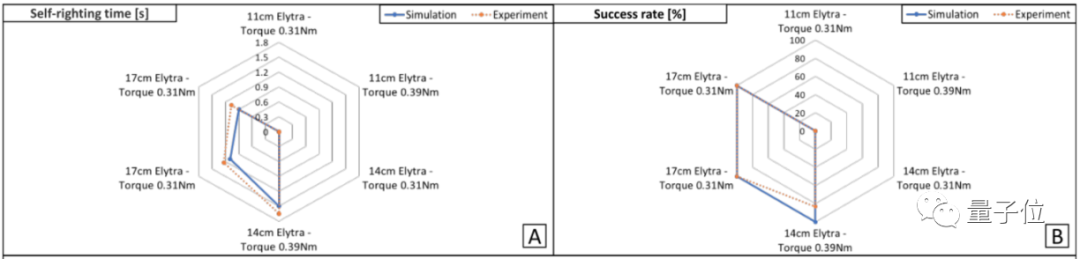
經過實驗發現,鞘翅越長,無人機“翻身”的成功率更高、所需時間更短。因此團隊最后選擇了17cm的鞘翅。
這就輕松解決了小型無人機在“躺平”時,需要人手動調整的麻煩。
同時,機翼還能在無人機上升時提供動力。
這個“甲蟲”無人機的性能如何?
只需1.1秒,斜坡平地都能翻
從翻身速度來看,這架無人機只需要1秒左右就能“鯉魚打挺”,直接翻過來。
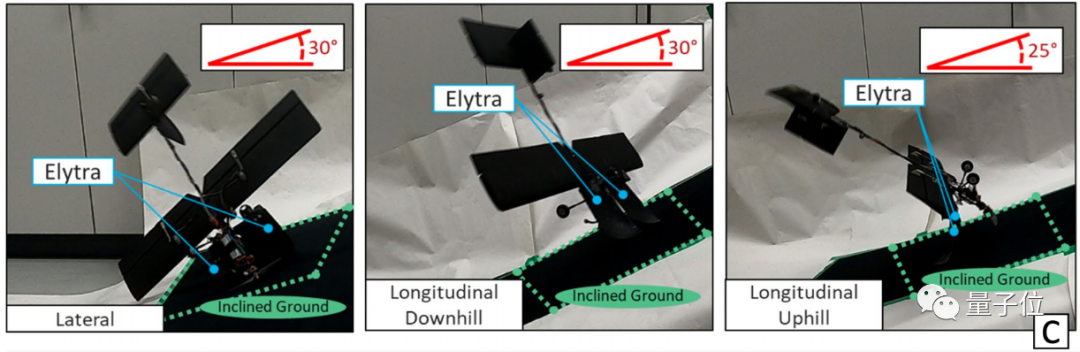
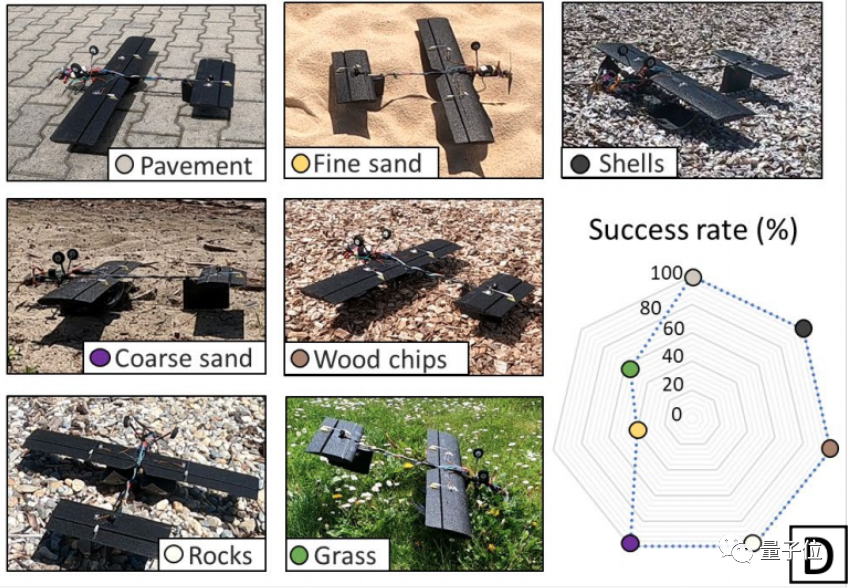
當然,設計后的無人機,地形適應能力也非常強,包括斜坡和不同路面都能進行翻身。
從斜坡來看,這架無人機在最高30°的斜坡上也能成功翻身(超過30°會打滑):
從路面類型來看,這個無人機在人行道、碎石路面、灑滿木屑的地面等5種地形上都能達到100%成功翻身的效果。
至于草地和沙地這種比較復雜的地形,成功率也在20%~40%左右。
從設計來看,相比于其他自適應機器人而言,“甲蟲”無人機在設計上要簡潔得多。
例如,“扶墻走”或是“變形”的自適應機器人,往往需要復雜的機械系統設計;而參考蟑螂設計的飛行機器人,又無法伸展機翼、提供升力。
至于普通的無人機,為了防止翻倒所做的一些設計,更是只能增加重量、降低動力。
但給無人機加上一對甲蟲翅膀后,不僅能給飛機提供上升動力、調整位置,還極大地降低了設計的復雜程度。
這讓網友想到了Minecraft里面的鞘翅。作為一種飛行工具,鞘翅在滑翔時會向兩邊展開:

△圖源:推特@Minecraft Dungeons
現在,游戲中的效果已經在無人機上實現了。
團隊介紹
幾名作者均來自瑞士洛桑聯邦理工學院(EPFL)的智能系統實驗室。
實驗室側重于AI和機器人研究方向,包括生物機器人、人機融合等。
實驗室負責人是Dario Floreano,引用次數達到28341次,單篇論文最高引用次數2500+。

這篇論文的一作Charalampos Vourtsis,除了做機器人以外,也會制作一些3D打印項目和計算機視覺方向的東西,例如3D打印樹莓派。

接下來,團隊還想進一步優化這個無人機,使它成為一個“保護殼”,保護機翼在刮蹭時不受損。
想要詳細了解甲蟲無人機的小伙伴,可以戳下方論文查看。
論文地址:
https://ieeexplore.ieee.org/document/9479684
參考鏈接:
[1]https://spectrum.ieee.org/tech-talk/robotics/drones/nothing-can-keep-this-drone-down
[2]https://minecraft.fandom.com/wiki/Elytra
- 首個GPT-4驅動的人形機器人!無需編程+零樣本學習,還可根據口頭反饋調整行為2023-12-13
- IDC霍錦潔:AI PC將顛覆性變革PC產業2023-12-08
- AI視覺字謎爆火!夢露轉180°秒變愛因斯坦,英偉達高級AI科學家:近期最酷的擴散模型2023-12-03
- 蘋果大模型最大動作:開源M芯專用ML框架,能跑70億大模型2023-12-07









