國產家庭機器人終于落地!連人帶床推你去上班,小五位數價格明年開賣
不是遙操那種
衡宇 發自 凹非寺
量子位 | 公眾號 QbitAI
咱也是趕上好時候了!
早上上班如果起不來床,可以使喚最新家庭機器人連人帶床把你推到公司去。

這回,大家千呼萬喚的具身智能機器人,終于真的進家門了。
還是國產的。

目前看來,它給人當牛做馬的時候,偶爾還是會出現一些無傷大雅的失誤。

但市場上調查了一圈,這已經是目前能看到的,國內最接近真正落地的家庭服務型機器人了。
不是炫技Demo,也不是遙控動作,這臺來自具身智能創業公司未來不遠的具身機器人F1,人家真的實打實干活,已經在幾十個家庭連續試用。
家庭機器人,不靠遙操
F1全身共22個自由度,支持自然的手臂、頭部、腰部動作。
身高升降范圍在1000mm–1430mm,可自適應不同家庭成員的交互高度。
手臂上下覆蓋范圍在地面和2350mm之間,便于在地面,桌椅、櫥柜等家庭常見高度下操作。

單臂可負載5kg,覆蓋家庭大部分場景,包括沉重的物品以及需要大力操作的冰箱門、洗碗機門、洗衣機門等。
末端執行器為夾爪,重復精度±0.05mm,可執行插拔電源,開啤酒,扭動旋鈕等精細操作;力控精度±0.1N,可避免抓取易碎物品時用力過大的問題。

此外,F1全身搭載近30個傳感器和6個攝像頭,形成多模態視覺系統,具備局部建圖、人物識別、實時避障能力。
越障高度25mm,過溝寬度35mm,可輕松越過門檻、地毯邊緣、電線等常見障礙。
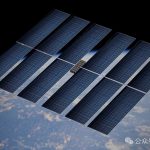
一眼看過去,F1最醒目的就是輪式底盤,以及高度可調、長臂猿式的雙機械臂。
未來不遠創始人兼CEO張翼引用了《2025北京統計年鑒》的數據,北京的人均面積住房建筑面積約37.2m2。而全國城鎮人均住房建筑面積也就差不多超過40m2。
這意味著機器人進家干活,必須要有很強的穿行和避障能力。
“人形機器人那玩意兒,在70m2的家里都不容易絲滑地干活。”
所以他們一開始就放棄了仿真人形這條路。為了方便機器人干活,適配城市的居住面積,輪式底盤的面積也從上一代的1/2m2縮小至1/4m2。
這個設計帶來了額外收益:電池空間大,續航時間更長。
在高強度工作狀態下,F1的續航超過8小時;待機時長超過一整天。
不止會做家務
能做家務,已經滿足了很多人對家庭機器人的預期。
但請注意,這家伙定位是“家庭機器人”,不是“家務機器人”。
準確來說,它的定位是家庭助理型具身智能。
張翼把家庭任務劃分為四類:孩子、老人、大清潔、廚房。
解釋一下,把廚房場景單列出來,一方面是因為廚房有很多corner case,復雜度過大;另一方面是在廚房里需要接觸很多油污,還要考慮機器人的自清潔能力,場景較為復雜。
未來不遠自家產品先從大清潔和孩子兩點入手。
大清潔場景下,機器人除了做灑掃除塵,還要完成清掃之外如整理、歸位、搬取等更高階任務。
站在做產品的視角,這簡直市場上赤裸裸擺明了的剛需。

而“孩子”這個模塊,是他們重點投入的場景——這并不是目前家庭機器人玩家們的主流敘事。
張翼表示,全球多個國家的入戶測試階段的數據反饋,機器人70%的行為都是在跟人交互。跟不同國家不同的人打交道,交互習慣不一樣,數據是非常關鍵。
小朋友通常是家里最愿意指揮機器人的那群人,行為多樣、高頻、好奇心強,也是天然的數據制造者。
幕后還有一個與創始團隊本身積累有關的原因——
創業機器人之前,張翼還有一段創業經歷:他是掌門教育的創始人,長期深耕在線一對一教育,幾乎每天都在和孩子、家長打交道。
他說自己對家庭和孩子太熟了,知道孩子什么時候會認真,什么時候會調皮,知道家長最在意的是什么。
“所以我們覺得這個是必須去切的。”目前F1中已經加入了若干面向兒童的功能,包括教育互動模塊。由于產品還未正式上市,張翼還是對F1身上與孩子相關的功能賣了個關子。
但他還是忍不住透露了兩句:
入戶測試反應都非常好,說我們(這一塊的功能)是非常剛的,大家都很愿意去用。
不靠遙操,自主完成多種長序列任務
在具身智能時代,機器人不能只會動,更要足夠聰明地完成復雜任務。
為了解決家庭場景經常存在的長序列任務中的理解與規劃問題,未來不遠提出了一種名為RVLA(Reverse VLA)?的模型架構。
這項技術的核心在于重構了任務執行的方式。
雖然訓練數據依然來自完整的連續任務,但在訓練階段,系統會將其拆解為多個清晰、邊界明確的原子行為單元,稱為AVLA(Atomic VLA)。
比如自然流暢的抬起手臂、環境自適應的抓取物體、自然平穩移至目標區域、平穩協調的松開物體什么的——每一個AVLA都是基礎動作的最小單位。

在模型架構層面,F1搭載的模型在架構上采用了上下分層:
- 上層是一個端到端的大模型,負責處理成功率要求不高、出錯代價低的任務;
- 下層則由多個小模型組成,針對不同物體和任務情境進行更精準的控制。
為進一步提升F1的雙臂操作表現,團隊引入了名為DAPO(Decoupled CLIP and Dynamic Sampling Policy Optimization)?的策略優化框架,它融合了強化學習與動態采樣機制。
未來不遠團隊首次將DAPO擴展至多專家動作模型,構建出一個高效、可實時響應的機械臂控制系統,專門適用于家庭復雜場景。
這樣做帶來了幾個關鍵優勢:
- 采用動態采樣機制,簡單任務減少計算消耗,復雜任務增加關鍵狀態采樣,從而提升整體訓練效率;
- 在強化學習過程中,將策略梯度優化從序列層面下沉到token層面,顯著減少了由序列長度波動引發的策略偏移問題;
- 優化了動作空間采樣與狀態評估,使機器人在面對多變的家庭環境時表現更穩定。
- 在實際執行中,VLA會依序完成每個AVLA元動作。
因為每個動作都經過專項訓練優化,單個動作的成功率非常高,從而確保了整個任務執行的穩定性。
張翼還介紹道,團隊在F1身上實現了高魯棒性的執行與糾錯機制:
一旦某個元動作失敗,系統會自動觸發重試邏輯,避免連鎖錯誤。
目前,F1已經能不靠遙操,自主完成部分家庭場景的長程任務。
如開冰箱取出食物、收納玩具、把衣服塞進洗衣機等等。

聯合創始人Louis介紹道,開酒、旋轉瓶蓋開飲料這種任務難度系數挺高,“基本只在我們機器人上看到”。

不過未來不遠也坦誠表示,對于未訓練過的物體和場景處理能力有限。
創業前3年,不融一分錢
2014年,張翼創立掌門1對1,后發展為估值78億元獨角獸,并于2021年在紐交所上市。
后來教育行業受到沖擊,張翼開始謀求新的創業之旅。
2021年,這個新方向最終落在了“家庭機器人”身上。
很多人難以理解。一個做教育起家的人,為什么要轉行做機器人?
但張翼覺得這并不是徹底的跳躍:“我本來就是搞技術的。當初從上海交大電院畢業,我的GPA是第一名。只是后來去教育領域創業了。”
不過他選擇入局的時候,別說具身智能了,連ChatGPT都還沒有問世。
張翼反而覺得這個時間點正好。
那時候我就覺得,20年后每個家庭都有一臺服務機器人是大概率事件。
真正屬于創業者的窗口,往往在大家還不信的時候。
交流過程中,張翼反復強調非共識這個詞,“風口來了就輪不到你了。只有非共識,才是創業公司的機會。”
說干就干。
于是,2021年開始立項調研,2022年正式注冊公司,干脆利落地投身到家庭機器人這件事上。

特別的是,成立最初的三年里,團隊沒從市場上拿一分錢。
張翼表示,自己經歷過一次創業,認識到行業發展有起伏,更加關注創業周期。
他認為家庭機器人是長周期(10年起步)行業,需要抵抗資本周期與技術泡沫。要確保公司在不同階段都能健康發展,就不想依賴資本的短期支持。
直到最近,他們覺得看到了產品的PMF(產品市場契合度),有明確的用戶落地場景和商業化前景,才開始小范圍開放融資。
創業前三年里,團隊一直遵循用戶需求,以試用數據為導向,反復打磨產品。
這期間他們砍掉了多個想當然的設計。
比如1.35米的超長機械臂,使用頻率并不如想象中那么多,還會增加體積,影響靈活性;比如更仿真的五指靈巧手,耐用性太差,在實驗場景下都撐不過兩個月;比如高負載能力,其實對普通家庭用戶而言實際使用頻率極低。
必須在真實家庭場景里跑上幾個月甚至半年,才能看出功能是否成立。
一年內,F1計劃在國內上市,更輕量級、居家可愛型的F2也會發布。
張翼透露,因為目標是打開消費級市場,F1正式售賣價格在小五位數。
- DeepSeek-V3.2系列開源,性能直接對標Gemini-3.0-Pro2025-12-01
- 誤入人均10個頂級offer的技術天團活動,頂尖AI人才的選擇邏輯我悟了2025-12-04
- 字節“豆包手機”剛開賣,吉利系進展也曝光了:首月速成200人團隊,挖遍華為小米榮耀2025-12-01
- 居然有21%的ICLR 2026評審純用AI生成…2025-11-30