雙重突破:全球首個零售VLA大模型來了!開源OpenWBT讓機器人遙操門檻暴降!
Galbot現場直播,全程無遙操、無需場景數據預采集
允中 發自 凹非寺
量子位 | 公眾號 QbitAI
6月6日-7日,2025 北京智源大會召開。作為全球具身智能領域最具影響力的學術與產業雙棲盛會,本次大會匯聚了頂尖科研機構、技術領軍企業和開源社群。
北京大學助理教授、銀河通用機器人創始人及CTO、智源學者王鶴博士受邀出席開幕式圓桌論壇。
銀河通用具身大模型機器人Galbot一同登上主論壇舞臺,面向全球觀眾直播展示最新技術成果。這是Galbot的全球直播首秀,全程無遙操,無需場景數據預采集。
此次主論壇直播,零距離展現了銀河通用具身大模型驅動機器人產業落地的硬實力。

以下是此次發布的核心成果:
端到端具身大模型GroceryVLA亮相主論壇
開幕式現場,銀河通用機器人Galbot G1登上主論壇舞臺,面向全球觀眾直播展示最新技術成果,零距離展現了銀河通用具身大模型驅動機器人產業落地的硬實力。
機器人在王鶴博士的語音指令下自主、精確的移動到準確位置并將飲料從貨架取出,全程無遙操、自主推理、并且無事先采集場景數據。
此次Galbot G1展示的貨架精準取貨,背后的技術正是銀河通用團隊最新研發的端到端具身大模型GroceryVLA。
可在現場搭建的1:1還原的真實商超場景中,實現復雜貨架抓取與交付的全流程自主執行。
它所展現的,并非一次臨時編排的演示流程,而是一次面向真實商業場景的能力展示:
從感知到動作、從語言指令到精準操作,全部依靠模型自主完成。其穩定、高效的表現,迅速引發現場學術專家、行業人士與媒體的圍觀與熱議。
也正因其在真實復雜環境中的卓越表現,這臺Galbot作為代表獲智源大會主辦方直接邀請,成為本屆大會唯一登上主論壇主舞臺,面向產業應用的具身大模型系統,在全場矚目下完成全球直播發布。
在智源大會主展區,銀河通用展示了兩臺“性格”迥異的具身大模型Galbot“迎賓機器人”和“售貨機器人”,憑借鮮明互動風格與真實應用能力,吸引了大量觀眾駐足圍觀,成為全場最受關注的技術展區之一。

據王鶴博士介紹,銀河通用機器人正通過與零售業態合作伙伴廣泛合作,年內計劃開設100家店。
作為全球首個面向零售行業的端到端具身VLA大模型,GroceryVLA標志著銀河通用在具身智能領域的重大技術突破。
以下是GroceryVLA五大核心能力的詳解,揭示其為何能夠穩定適配商超復雜環境、實現高度通用的自主操作。
(一)強適用性
GroceryVLA采用端到端模型架構,突破傳統“視覺+軌跡規劃”方案,在緊密排布、涵蓋數十種SKU的真實貨架環境中,自主識別并完成商品抓取。
無需路徑規劃,即可在幾乎無空隙的貨架上穩定作業,展現出卓越的操作效率與靈活性,標志著端到端大模型驅動的閉環控制已具備商用能力。
(二)高度通用性
模型無需針對每種商品包裝單獨調參,支持軟包裝(如袋裝面包、鹵蛋)、硬盒、塑料瓶、透明果凍杯等多樣形態商品的精準抓取,實現了跨品類的統一抓取策略。
無論是剛性包裝還是柔性物體,都能精準取放,滿足全品類零售場景需求。
(三)跨場景泛化能力
基于大規模仿真數據和多場景訓練,模型可直接泛化至全新環境。
此次展會為其首次異地實戰部署,面對光照變化、貨物隨機擺放等復雜條件依然表現穩定。
主論壇全球直播首秀更實現全程無遙控、無場地預采,全面展現其卓越的零樣本泛化能力。
(四)自主決策能力
面對貨架上多個相似商品,GroceryVLA能夠基于任務需求動態判斷最優抓取目標,區別于傳統靜態“指定抓”策略。
系統按照指定順序精準執行,展現出高級任務理解與靈活調度能力,確保多樣化操作流程有條不紊。
(五)強抗干擾性
在抓取過程中,模型具備實時閉環策略調整能力,能夠快速響應現場人為干擾,如貨物被移走、增加或推擠,甚至抓取動作中瓶子被碰倒后重新扶正,保障任務連續高效完成,展現出真正具備商業落地價值的魯棒性和實用性。
無論是面對主論壇舞臺高強度燈光和復雜場地條件干擾,還是在展區人流密集穿梭環境中,GroceryVLA所驅動的Galbot始終穩定完成了從視覺感知、目標識別到自主抓取交付的全流程閉環操作,全面展現出模型的工程穩定性與實際可用性。
這一表現,不僅是銀河通用技術自信的體現,更意味著其具身智能產品已具備真正面向商業落地的能力。
OpenWBT開源系統正式發布,推動人形機器人真正“工作起來”
除了推動Galbot在更廣泛的零售場景的穩定商業落地外,銀河通用也在持續關注人形機器人的技術進展。
在人形機器人領域,穩定易用且支持全身動作的遙操作系統長期缺失,成為制約數據采集、高質量大模型訓練及商業應用落地的關鍵瓶頸。
傳統系統部署繁瑣、兼容性差,且多局限于上半身動作,難以覆蓋真實工作場景所需的完整人類工作空間。
基于此,銀河通用聯合清華大學弋力助理教授團隊正式發布OpenWBT ——全球首款全開源、多機型、跨虛實人形機器人全身遙操作系統。
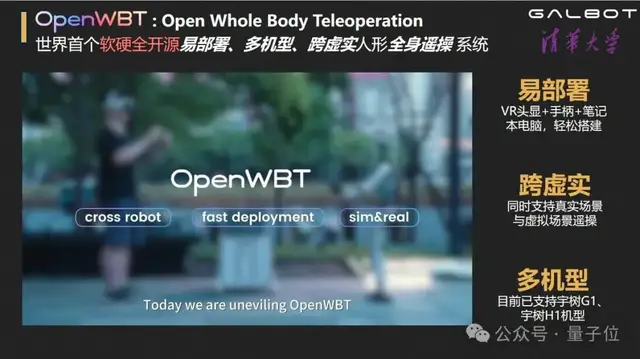
OpenWBT創新實現了小時級快速部署,用戶僅憑一副VR眼鏡與一臺普通電腦,便可從零完成系統搭建與調試,迅速解鎖人類級操作自由度。
OpenWBT在技術上的具備三大核心突破詳解如下:
快速部署能力
系統設計注重易用性,初學者僅需一副VR眼鏡和一臺普通電腦,最多僅需數小時內即可完成系統搭建與調試,顯著降低部署門檻,同時可以輕松適配室內外各種環境。
多機型兼容性
現已支持Unitree G1、H1兩多款機器人,涵蓋不同自由度與身高規格,實現對完整人類工作空間的高效覆蓋,滿足多樣化機器人硬件需求。


對虛實遙操的靈活支持
不僅支持對真實物理機器人的實時遙控,還兼容虛擬仿真環境遙操作,方便大規模數據采集和基于仿真數據的泛化訓練,促進模型高效迭代。

在動作控制方面,OpenWBT將機器人運動拆分為“走路、蹲下、彎腰、觸達”等基礎“原子技能”,每項技能均在真實環境中經過穩定訓練與驗證。
通過先進的技能融合算法,系統能夠自動組合原子動作,形成連貫復雜的任務序列,實現機器人“碰天觸地”的全身動作協調能力。
OpenWBT的全面開源發布,是銀河通用致力于構建開放共享具身智能生態的重要成果。
作為全球首個標準化、模塊化的人形機器人全身遙操作框架,OpenWBT極大降低了行業技術門檻,為科研機構和產業界提供了穩定高效的訓練與測試平臺。
該項目推動了開放共享的社區生態建設,促進更多研究機構和企業的協同參與,加速具身智能技術的積累與迭代,助力人形機器人從實驗室走向實際應用,實現產業創新與共贏發展。
展望未來,銀河通用將繼續秉持技術創新與開放合作并重的發展理念,引領人形機器人從“實驗室探索”邁向“廣泛應用”,實現機器人真正“工作起來”,深化具身大模型技術與產業協作的融合應用,推動更多行業場景智能化升級,助力構建更加智能、高效、可持續的未來社會。
同時,銀河通用期待與更多合作伙伴攜手共進,共同譜寫具身智能新時代的輝煌篇章。
立即體驗OpenWBT:
https://github.com/GalaxyGeneralRobotics/OpenWBT
- DeepSeek-V3.2系列開源,性能直接對標Gemini-3.0-Pro2025-12-01
- 誤入人均10個頂級offer的技術天團活動,頂尖AI人才的選擇邏輯我悟了2025-12-04
- 字節“豆包手機”剛開賣,吉利系進展也曝光了:首月速成200人團隊,挖遍華為小米榮耀2025-12-01
- 居然有21%的ICLR 2026評審純用AI生成…2025-11-30
相關閱讀